Thomson Linear Motion Optmized


스테퍼 모터 선형 구동기
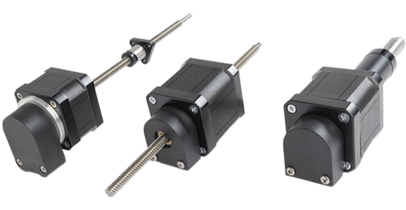
Thomson 스테퍼 모터 선형 구동기는 하이브리드 스테퍼 모터와 정밀 리드 스크류를 단일한 소형 엔빌로프에 통합했습니다. 구동기는 현재 회전 스크류(MLS), 회전 너트(MLN), 구동기(MLA) 등, 3가지의 기본 구성 요소로 제공됩니다.
표준 스테퍼 모터 선형 구동기
스크류 회전식 (MLS)
MLS 어셈블리는 스테퍼 모터가 리드 스크류를 회전시켜 리드 너트에 연결된 하중을 이동시킵니다.
Linear Motion = Lead Screw Rotation × Pitch
너트 회전식 (MLN)
MLN 어셈블리는 스테퍼 모터 본체 내부에서 너트를 회전시켜 작동합니다.
Linear Motion = Nut Rotation × Pitch
Rotary Encoders Available as a Standard Option
로터리 인코더는 위치, 속도, 방향 및 기타 유용한 모션 파라미터에 대한 실시간 피드백을 제공합니다.
Thomson은 모든 스테퍼 모터 리니어 액추에이터에 대해 사전 조립된 인코더를 표준 옵션으로 제공합니다.
맞춤형 스테퍼 모터 선형 구동기 옵션

최첨단 모터와 리드 스크류 기술을 결합한 사전 엔지니어링된 스테퍼 모터 선형 구동기는 고정밀 응용 분야에 작은 선형 모션을 제공합니다.
Thomson 스테퍼 모터 선형 구동기를 선택해야 하는 이유
Thomson은 세 가지 기본 구성을 제공합니다 – 스크류 회전식(MLS)과 너트 회전식(MLN)입니다. 개방형 설계 스크류 회전식과 너트 회전식 모터라이즈 리드 스크류는 외부 가이드가 있거나 높은 수준의 설계 유연성이 필요한 애플리케이션에 적합합니다. 반면, 모터라이즈 리드 스크류 액추에이터의 폐쇄형 어셈블리는 설계 프로세스를 더욱 간소화하고 외부 가이드가 필요하지 않아 이상적인 제품입니다.
맞춤형 옵션
Thomson은 전 세계의 OEM(Original Equipment Manufacture) 업체와 정기적으로 협업하여 문제를 해결하고, 효율성을 증진시키며, 고객에게 전달되는 가치를 개선합니다. 기술 및 응용 분야에서 쌓은 당사의 경험을 활용하면 표준 제품을 넘어 다음 제품의 정확한 요구 사항을 충족하는 데 도움이 될 수 있습니다.어디서 시작할 수 있습니까?
Thomson에서는 다양한 온라인 리소스를 제공하여 고객이 어디서 구매 결정 프로세스를 진행하고 있든 고객 여러분께 도움을 드립니다.VIDEO: Stepper Motor Linear Actuator Assembly Configurations
Precision lead screws can be combined with a stepper motor in a number of ways. At Thomson, we offer three configurations of stepper motor linear actuators to meet the various needs of our customers' applications. Learn more about them and discover which of them can benefit your linear motion designs.
VIDEO: What is a Stepper Motor and How is it Useful for Linear Motion?
Combined with a precision lead screw, the stepper motor is utilized in one of Thomson’s main product families – stepper motor linear actuators. This video takes a closer look at this motor, its main components, how they work, and why they are useful in linear motion applications in comparison to other types of motors.

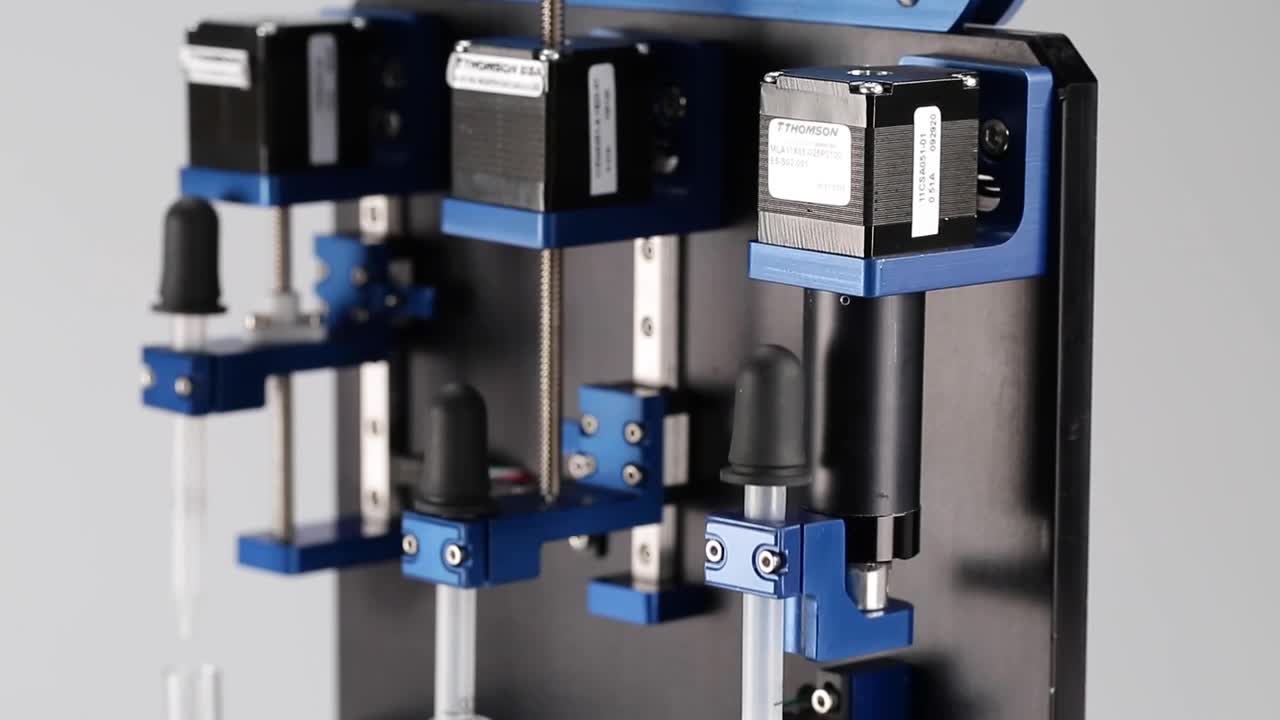
동영상: 테이퍼락을 갖춘 스테퍼 모터 선형 구동기
현장에서 Thomson 스테퍼 모터 선형 구동기를 정확하게 사용하는 방법을 배우십시오. 정밀 설계 제작된 이 장치는 하이브리드 스테퍼 모터와 리드 스크류를 단일한 소형 엔빌로프에 통합하여 대체 기술보다 작고 강력하며 보다 효율적인 솔루션으로 분명한 이점을 제공합니다.
Technical Articles
-
Leveraging Stepper Motor Linear Actuator Configurability
When designers and integrators need simple, flexible and compact linear actuation, they often turn to stepper motor linear actuators (SMLAs). The high configurability of SMLAs is among their greatest virtues, but sorting through myriad configuration options to tailor the optimal solution for a particular application can be a challenge for even the most seasoned motion engineer. Understanding the unique capabilities and limitations of each type of SMLA will make it easier to take maximum advantage of their wide range of flexibility.
-
스테퍼 모터 선형 구동기용 회전 방지 지침 구현
리드 스크류를 스테퍼 모터와 통합하는 것은 정밀한 선형 모션을 얻는 간단하고 비용 효율적인 방법입니다. 하지만 그 정밀도를 얻으려면 사용자가 외부에서 추가하거나 제조업체가 설계해야 하는 회전 방지 유도 체계가 필요합니다. 어떤 옵션이 적합한지 결정하려면 유도 시스템의 필요성을 분석하고 각 접근 방식의 득실을 따져 보아야 합니다.
-
전동 리드 스크류 구동기를 사용하여 선형 모션 어셈블리를 단일 구성 요소로 감축
기계 내에서 선형 모션을 지정할 때 시스템 설계자에게는 선택할 수 있는 옵션이 많습니다. 올바른 결정은 설치 용이성, 사용 공간, 운영 비용에 영향을 줄 수 있습니다. 선형 모션을 달성하기 위한 일반적인 구동 메커니즘은 스테퍼 모터와 외부에서 지원되는 리드 스크류 기반 어셈블리입니다. 그러나 보다 간편하고 설치하기 쉬운 접근 방식은 유도 및 지원 체계가 기본 제공되는 구동 메커니즘을 선택하여 일반적으로 이러한 기능을 수행하는 외부 구성 요소를 설치하거나 이와 관련된 복잡한 절차를 진행할 필요성을 없애는 것입니다.
스테퍼 모터 선형 구동기 사양(인치 단위):
| S = Rotating Screw (MLS), N = Rotating Nut (MLN) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Linear Travel / Full Step (μ in.) |
Lead (mm) |
Lead Designator (mm) |
Motor | |||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | |||||||||
| Diameter Designator [hundredths of in. diameter] | ||||||||||||
| 18 | 18 | 25 | 25 | 31 | 37 | 31 | 37 | 43 | 50 | |||
| 0.063² | 0.013 | 0013 | S | S,N | S¹³ | S¹³ | S,N¹³ | S,N | S¹³ | |||
| 0.125² | 0.025 | 0025 | S | S,N | S¹ | S,N | S¹³ | |||||
| 0.157 | 0.031 | 0031 | S | S,N | S¹ | S,N | ||||||
| 0.165 | 0.033 | 0033 | S¹ | |||||||||
| 0.179 | 0.036 | 0036 | +I4 | S | S,N | |||||||
| 0.200 | 0.040 | 0040 | S¹ | S,N | ||||||||
| 0.209 | 0.042 | 0042 | S | S,N | S¹³ | S¹³ | S,N¹³ | S,N | ||||
| 0.250 | 0.050 | 0050 | S | S,N | S | S,N | S¹ | S,N | S¹³ | S¹³ | ||
| 0.313 | 0.063 | 0063 | S | S,N | S | S,N | S¹ | |||||
| 0.357 | 0.071 | 0071 | S | S,N | ||||||||
| 0.394 | 0.079 | 0079 | S | S,N | S¹ | S,N | ||||||
| 0.417 | 0.083 | 0083 | S | S¹ | S,N | S,N | ||||||
| 0.490 | 0.098 | 0098 | S¹ | |||||||||
| 0.500 | 0.100 | 0100 | S | S,N | S | S,N | S¹ | |||||
| 0.591 | 0.118 | 0118 | S | S,N | ||||||||
| 0.625 | 0.125 | 0125 | S | S,N¹ | S | S,N | S¹ | S,N | S¹ | |||
| 0.787 | 0.157 | 0157 | S | S,N | ||||||||
| 0.833 | 0.167 | 0.167 | S | S | S,N | S,N | ||||||
| 0.960 | 0.192 | 0.192 | S | S,N | ||||||||
| 1.000 | 0.200 | 0200 | S | S,N | S | S,N | S¹ | S,N | S¹ | |||
| 1.180 | 0.236 | 0236 | S¹ | |||||||||
| 1.250 | 0.250 | 0250 | S | S,N | S | S | S,N | S,N | S¹ | S¹ | ||
| 1.500 | 0.300 | 0.300 | S¹ | S,N | ||||||||
| 1.665 | 0.333 | 0.333 | S | S,N¹³ | ||||||||
| 1.875 | 0.375 | 0.375 | S | S,N¹³ | S¹ | S,N | ||||||
| 2.000 | 0.400 | 0.400 | S | S,N | ||||||||
| 2.500 | 0.500 | 0500 | S | S,N¹³ | S | S,N | S | S | S,N | S,N | S¹ | S¹ |
| 3.750 | 0.750 | 0750 | S | S,N | S¹³ | S,N | ||||||
| 4.000 | 0.800 | 0.800 | S¹³ | |||||||||
| 5.000 | 1.000 | 1000 | S³ | S³ | S,N³ | S,N³ | S¹³ | |||||
| 6.000 | 1.200 | 1.200 | S¹³ | S,N | ||||||||
| 7.500 | 1.500 | 1.500 | S¹³ | |||||||||
1. 일부 리드는 고성능 너트 소재, 너트 회전식(MLN) 구성 또는 일부 백래시 방지 너트에서 제공되지 않을 수 있습니다. 자세한 내용은 Thomson에 문의하십시오.
2. 미세 피치 리드 스크류는 기존 리드 스크류에 비해 하중 용량이 상당히 낮을 수 있습니다.
3. 리드 스크류는 정밀 등급 정확도(P)는 제공되지 않습니다.
스테퍼 모터 선형 구동기 사양(미터 단위):
| S = Rotating Screw (MLS), N = Rotating Nut (MLN) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Linear Travel / Full Step (mm) |
Lead (mm) |
Lead Designator² (mm) |
Motor | ||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | ||||||||
| Diameter Designator | |||||||||||
| M04 | M04 | M06 | M06 | M08 | M10 | M08 | M10 | M12 | |||
| 3 | 0.6 | 006 | S | S,N | |||||||
| 5 | 1.0 | 010 | S | S,N | S | S,N | |||||
| 6 | 1.2 | 012 | S | S,N | |||||||
| 10 | 2.0 | 020 | S | S | S,N | S,N | S¹ | ||||
| 15 | 3.0 | 030 | S | S,N | S¹ | ||||||
| 20 | 4.0 | 040 | S | S,N | S | S,N | S¹ | ||||
| 25 | 5.0 | 050 | S | S,N | |||||||
| 30 | 6.0 | 060 | S | S,N | S¹ | S,N | S¹ | ||||
| 40 | 8.0 | 080 | S³ | S,N³ | S | S,N | |||||
| 50 | 10.0 | 100 | S | S,N | S¹ | ||||||
| 60 | 12.0 | 120 | S | S,N | S | S¹ | S,N | S,N | |||
| 75 | 15.0 | 150 | S¹ | ||||||||
| 80 | 16.0 | 160 | S¹ | ||||||||
| 90 | 18.0 | 180 | S | S,N | |||||||
| 100 | 20.0 | 200 | S³ | S | S,N³ | S,N | |||||
| 125 | 25.0 | 250 | S¹³ | ||||||||
| 175 | 35.0 | 350 | S¹³ | S,N | |||||||
| 225 | 45.0 | 450 | S¹³ | ||||||||
1. 일부 리드는 고성능 너트 소재, 너트 회전식(MLN) 구성 또는 일부 백래시 방지 너트에서 제공되지 않을 수 있습니다. 자세한 내용은 Thomson에 문의하십시오.
3. 리드 스크류는 정밀 등급 정확도(P)는 제공되지 않습니다.
스테퍼 모터 선형 구동기 주요 장점
- 토크 밀도 증가
- 효율 향상
- 스크류 회전식 또는 너트 회전식
- 맞춤형 크기/리드 제공 가능
- 테이퍼록 이점
- 소음 감소
- 인치 또는 미터법 버전
응용 예
- 의료 장치
- X-Y 스테이지
- 3D 인쇄
- HVAC 제어 밸브
- 피펫팅 장치
- CNC 기계
- 유체/시린지 펌프
CAD 모델 선택:
MLS

MLN
