Thomson Linear Motion Optmized


Atuador linear do motor de etapas
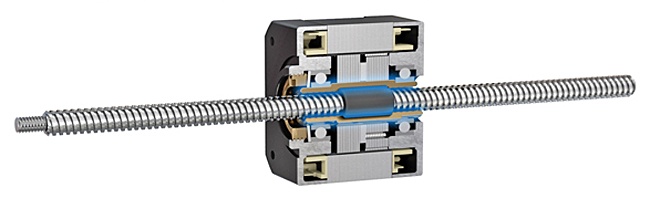
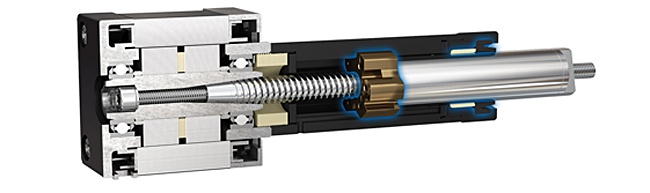
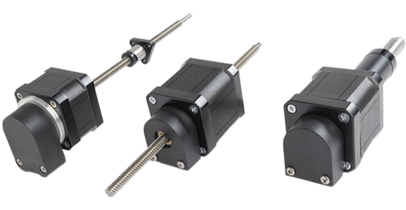
Os atuadores lineares do motor de etapas da Thomson combinam um motor híbrido de etapas e um parafuso de avanço de precisão em um envelope compacto. Agora são oferecidos em três configurações básicas: eixo rotativo (MLS), porca giratória (MLN) e atuador (MLA).
Atuadores lineares de motor de passo padrão

Eixo rotativo (MLS)
Os conjuntos de MLS atuam fazendo o motor girar um parafuso de avanço e convertendo essa rotação para a carga ligada à porca de avanço.
Porca rotativa (MLN)
Os rotativade MLN atuam girando uma porca dentro do corpo do motor de passo. O movimento é conseguido restringindo o motor e convertendo a carga conectada ao parafuso de avanço ou restringindo o parafuso de avanço e convertendo a carga conectada ao motor de passo.
Rotary Encoders Available as a Standard Option

Os encoders rotativos fornecem feedback em tempo real sobre posição, velocidade, direção e muitos outros parâmetros de movimento úteis.
A Thomson oferece encoders pré-montados como opção padrão em todos os atuadores lineares com motor de passo.
Opções de atuadores lineares personalizados com motor de passo

Combinando tecnologias de motor de ponta e parafuso de avanço, os atuadores lineares de motor de passo pré-projetados oferecem movimento linear compacto para aplicações de alta precisão.
Por que escolher os atuadores lineares do motor de etapas Thomson?
A Thomson oferece duas configurações básicas – parafuso rotativo (MLS) e porca rotativa (MLN). Os parafusos de avanço motorizados de arquitetura aberta do eixo rotativo e da porca rotativa são adequados para aplicações em que está presente orientação externa ou em que é necessário um alto nível de flexibilidade de design.
Opções de personalização
A Thomson colabora diariamente com fabricantes de equipamentos mundiais para resolver problemas, melhorar a eficiência e aumentar o valor passado aos clientes. Nossa experiência em tecnologia e aplicação pode ser aproveitada para ajudá-lo a ir além dos produtos padrão para atender às necessidades exatas do seu próximo produto.Onde você pode começar?
A Thomson oferece muitos recursos on-line para ajudá-lo, não importa onde você esteja no processo de decisão de compra:VIDEO: Stepper Motor Linear Actuator Assembly Configurations
Precision lead screws can be combined with a stepper motor in a number of ways. At Thomson, we offer three configurations of stepper motor linear actuators to meet the various needs of our customers' applications. Learn more about them and discover which of them can benefit your linear motion designs.
VIDEO: What is a Stepper Motor and How is it Useful for Linear Motion?
Combined with a precision lead screw, the stepper motor is utilized in one of Thomson’s main product families – stepper motor linear actuators. This video takes a closer look at this motor, its main components, how they work, and why they are useful in linear motion applications in comparison to other types of motors.

VÍDEO: Atuador linear do motor de etapas com Taper-Lock
Aprenda a fazer a manutenção correta em campo do atuador linear do motor de etapas da Thomson. As unidades de engenharia de precisão combinam um motor híbrido de etapas e um parafuso de avanço em um envelope compacto para oferecer vantagens claras com uma solução menor, mais resistente e mais eficiente do que as tecnologias alternativas.
Technical Articles
-
Leveraging Stepper Motor Linear Actuator Configurability
When designers and integrators need simple, flexible and compact linear actuation, they often turn to stepper motor linear actuators (SMLAs). The high configurability of SMLAs is among their greatest virtues, but sorting through myriad configuration options to tailor the optimal solution for a particular application can be a challenge for even the most seasoned motion engineer. Understanding the unique capabilities and limitations of each type of SMLA will make it easier to take maximum advantage of their wide range of flexibility.
-
Implementação da orientação antirrotação para atuadores lineares do motor de passo
A integração de parafusos de avanço com motores de passo é um método simples e econômico de obter movimento linear preciso. Mas alcançar essa precisão requer orientação antirrotacional, que deve ser adicionada externamente pelo usuário ou projetada pelo fabricante. Para determinar qual opção faz sentido para você, analise sua necessidade de um sistema de orientação e pondere as vantagens e desvantagens de cada abordagem.
-
Reduza seus conjuntos de movimento linear a um único componente com atuadores de parafuso de avanço motorizados
Quando se trata de especificar o movimento linear em uma máquina, os projetistas de sistemas têm muitas opções de escolha. Fazer a escolha certa pode afetar a facilidade de instalação, a área ocupada e o custo de operação. Um mecanismo de acionamento comum para alcançar o movimento linear é um motor de passo e um conjunto baseado em parafuso de avanço com suporte externo. Uma abordagem mais simples e fácil de instalar, no entanto, é selecionar um mecanismo de acionamento com orientação e suporte integrados, eliminando assim a necessidade de componentes externos que normalmente executariam essas funções e a complexidade que os acompanha.
Especificações de atuador linear do motor de etapas (unidades imperiais):
| S = Parafuso rotativo (MLS), N = Porca rotativa (MLN) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Deslocamento linear / etapa completa (μ pol.) |
Avanço (mm) |
Designador de condutor (mm) |
Motor | |||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | |||||||||
| Designador de diâmetro [diâmetro de centésimos de pol.] | ||||||||||||
| 18 | 18 | 25 | 25 | 31 | 37 | 31 | 37 | 43 | 50 | |||
| 0,063² | 0,013 | 0013 | S | S,N | S¹³ | S¹³ | S,N¹³ | S,N | S¹³ | |||
| 0,125² | 0,025 | 0025 | S | S,N | S¹ | S,N | S¹³ | |||||
| 0,157 | 0,031 | 0031 | S | S,N | S¹ | S,N | ||||||
| 0,165 | 0,033 | 0033 | S¹ | |||||||||
| 0,179 | 0,036 | 0036 | S | S,N | ||||||||
| 0,200 | 0,040 | 0040 | S¹ | S,N | ||||||||
| 0,209 | 0,042 | 0042 | S | S,N | S¹³ | S¹³ | S,N¹³ | S,N | ||||
| 0,250 | 0,050 | 0050 | S | S,N | S | S,N | S¹ | S,N | S¹³ | S¹³ | ||
| 0,313 | 0,063 | 0063 | S | S,N | S | S,N | S¹ | |||||
| 0,357 | 0,071 | 0071 | S | S,N | ||||||||
| 0,394 | 0,079 | 0079 | S | S,N | S¹ | S,N | ||||||
| 0,417 | 0,083 | 0083 | S | S¹ | S,N | S,N | ||||||
| 0,490 | 0,098 | 0098 | S¹ | |||||||||
| 0,500 | 0,100 | 0100 | S | S,N | S | S,N | S¹ | |||||
| 0,591 | 0,118 | 0118 | S | S,N | ||||||||
| 0,625 | 0,125 | 0125 | S | S,N¹ | S | S,N | S¹ | S,N | S¹ | |||
| 0,787 | 0,157 | 0157 | S | S,N | ||||||||
| 0,833 | 0,167 | 0,167 | S | S | S,N | S,N | ||||||
| 0,960 | 0,192 | 0,192 | S | S,N | ||||||||
| 1,000 | 0,200 | 0200 | S | S,N | S | S,N | S¹ | S,N | S¹ | |||
| 1,180 | 0,236 | 0236 | S¹ | |||||||||
| 1,250 | 0,250 | 0250 | S | S,N | S | S | S,N | S,N | S¹ | S¹ | ||
| 1,500 | 0,300 | 0,300 | S¹ | S,N | ||||||||
| 1,665 | 0,333 | 0,333 | S | S,N¹³ | ||||||||
| 1,875 | 0,375 | 0,375 | S | S,N¹³ | S¹ | S,N | ||||||
| 2,000 | 0,400 | 0,400 | S | S,N | ||||||||
| 2,500 | 0,500 | 0500 | S | S,N¹³ | S | S,N | S | S | S,N | S,N | S¹ | S¹ |
| 3,750 | 0,750 | 0750 | S | S,N | S¹³ | S,N | ||||||
| 4,000 | 0,800 | 0,800 | S¹³ | |||||||||
| 5,000 | 1,000 | 1000 | S³ | S³ | S,N³ | S,N³ | S¹³ | |||||
| 6,000 | 1,200 | 1,200 | S¹³ | S,N | ||||||||
| 7,500 | 1,500 | 1,500 | S¹³ | |||||||||
1. Alguns condutores talvez não estejam disponíveis em material de porca de alto desempenho, configurações de porca rotativa (MLN) ou algumas porcas antirrecuo. Entre em contato com a Thomson para obter mais detalhes.
2. Parafusos de avanço de passo fino podem ter capacidades de carga substancialmente mais baixas em comparação com os parafusos de avanço tradicionais.
3. Parafuso de avanço não disponível no grau de precisão (P)
Especificações de atuador linear do motor de etapas (unidades métricas):
| S = Parafuso rotativo (MLS), N = Porca rotativa (MLN) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Deslocamento linear / etapa completa (mm) |
Avanço (mm) |
Designador de condutor² (mm) |
Motor | ||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | ||||||||
| Designador de diâmetro | |||||||||||
| M04 | M04 | M06 | M06 | M08 | M10 | M08 | M10 | M12 | |||
| 3 | 0,6 | 006 | S | S,N | |||||||
| 5 | 1,0 | 010 | S | S,N | S | S,N | |||||
| 6 | 1,2 | 012 | S | S,N | |||||||
| 10 | 2,0 | 020 | S | S | S,N | S,N | S¹ | ||||
| 15 | 3,0 | 030 | S | S,N | S¹ | ||||||
| 20 | 4,0 | 040 | S | S,N | S | S,N | S¹ | ||||
| 25 | 5,0 | 050 | S | S,N | |||||||
| 30 | 6,0 | 060 | S | S,N | S¹ | S,N | S¹ | ||||
| 40 | 8,0 | 080 | S³ | S,N³ | S | S,N | |||||
| 50 | 10,0 | 100 | S | S,N | S¹ | ||||||
| 60 | 12,0 | 120 | S | S,N | S | S¹ | S,N | S,N | |||
| 75 | 15,0 | 150 | S¹ | ||||||||
| 80 | 16,0 | 160 | S¹ | ||||||||
| 90 | 18,0 | 180 | S | S,N | |||||||
| 100 | 20,0 | 200 | S³ | S | S,N³ | S,N | |||||
| 125 | 25,0 | 250 | S¹³ | ||||||||
| 175 | 35,0 | 350 | S¹³ | S,N | |||||||
| 225 | 45,0 | 450 | S¹³ | ||||||||
1. Alguns condutores talvez não estejam disponíveis em material de porca de alto desempenho, configurações de porca rotativa (MLN) ou algumas porcas antirrecuo. Entre em contato com a Thomson para obter mais detalhes.
3. Parafuso de avanço não disponível no grau de precisão (P)
Destaques do atuador linear do motor de etapas
- Maior densidade de torque
- Melhor eficiência
- Parafuso rotativo ou porca rotativa
- Tamanhos/cabos personalizados disponíveis
- Vantagem de trava cônica
- Menor ruído
- Versões métricas ou em polegadas
Exemplos de aplicações
- Dispositivos médicos
- Estágios X-Y
- Impressão em 3D
- Válvulas de controle HVAC
- Dispositivos de pipetagem
- Máquinas CNC
- Bombas de seringa/fluidos
Escolha seu modelo CAD:
MLS

MLN
