Thomson Linear Motion Optmized


Actionneur linéaire à moteur pas à pas
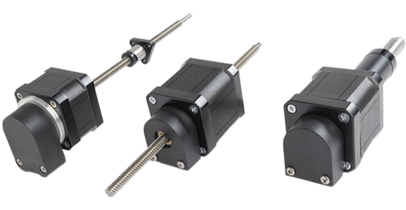
Les vis-mères motorisées de Thomson associent un moteur pas à pas hybride à une vis-mère de précision dans une enveloppe compacte. La technologie Taper-Lock, en instance de brevet, permet un bridage sûr et parfaitement aligné, ainsi qu’un désaccouplement rapide. Les vis-mères motorisées de Thomson sont disponibles dans deux configurations de référence, la vis rotative (S) et l'écrou rotatif (N). Les ensembles de vis-mères peuvent s'actionner par l'intermédiaire du moteur qui entraîne une rotation, et translater une charge attachée à l'écrou-mère. Les ensembles d'écrous-mères sont actionnés par la rotation d'un écrou dans le corps du moteur. Le mouvement est obtenu en exerçant une contrainte sur le moteur et en translatant une charge attachée à la vis-mère ou en exerçant une contrainte sur la vis-mère et en translatant une charge attachée au moteur.
Visionnez notre webinaire sur l’actionneur linéaire à moteur pas à pas >
Actionneurs linéaires à moteur pas à pas standard

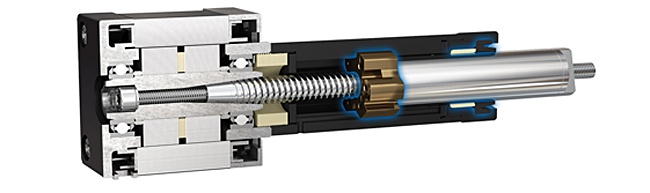
Vis rotative (MLS)
Les ensembles MLS sont actionnés grâce à la rotation d'une vis de commande entraînée par le moteur pas à pas et la translation d'une charge fixée à l'écrou d'entraînement.
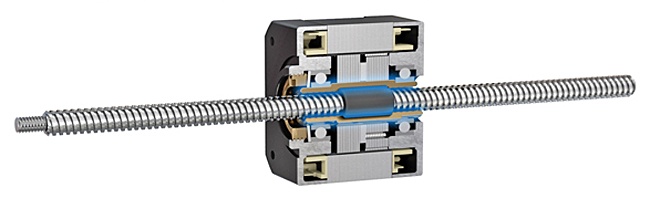
Écrou rotatif (MLN)
Les ensembles MLN sont actionnés grâce à la rotation d'un écrou dans le corps du moteur pas à pas. Le mouvement est réalisé par contrainte du moteur et translation d'une charge fixée à la vis de commande ou par contrainte de la vis de commande et translation d'une charge fixée au moteur pas à pas.
Rotary Encoders Available as a Standard Option

Les codeurs rotatifs fournissent une rétroaction en temps réel sur la position, la vitesse, la direction et de nombreux autres paramètres de mouvement utiles.
Thomson propose des codeurs pré-assemblés en option standard sur tous les actionneurs linéaires à moteur pas à pas.
Options d'actionneur linéaire à moteur pas à pas personnalisé

Combinant des technologies de moteur et de vis-mère de pointe, les vérins linéaires à moteur pas à pas préconçus mettent une solution de mouvement linéaire compacte à la disposition des applications à haute précision.
Pourquoi choisir un vérin linéaire à moteur pas à pas Thomson ?
Thomson propose deux configurations de base : vis rotative (MLS) et écrou rotatif (MLN). La vis rotative à architecture ouverte et les vis-mères motorisées à écrou rotatif conviennent aux applications où un guidage externe est présent ou lorsqu'un haut niveau de flexibilité de conception est requis.
Options de personnalisation
Thomson collabore régulièrement avec des fabricants d'équipements d'origine partout dans le monde pour résoudre les problèmes, améliorer l'efficacité et renforcer la valeur transmise à ses clients. Notre expérience en matière de technologies et d'applications peut vous aider à obtenir des produits personnalisés répondant à tous les besoins de votre prochain produit.Par où commencer ?
Thomson propose un grand nombre de ressources en ligne pour vous aider, quel que soit le stade où vous vous trouvez dans le processus décisionnel d'achat :VIDEO: Stepper Motor Linear Actuator Assembly Configurations
Precision lead screws can be combined with a stepper motor in a number of ways. At Thomson, we offer three configurations of stepper motor linear actuators to meet the various needs of our customers' applications. Learn more about them and discover which of them can benefit your linear motion designs.
VIDEO: What is a Stepper Motor and How is it Useful for Linear Motion?
Combined with a precision lead screw, the stepper motor is utilized in one of Thomson’s main product families – stepper motor linear actuators. This video takes a closer look at this motor, its main components, how they work, and why they are useful in linear motion applications in comparison to other types of motors.

VIDÉO : Actionneur linéaire à moteur pas à pas avec Taper-Lock
Découvrez comment entretenir correctement la vis-mère motorisée Thomson sur site. Les unités de précision allient un moteur pas à pas hybride et une vis-mère dans une enveloppe compacte, et offrent ainsi tous les avantages d'une solution plus petite, plus solide et plus efficace que les autres technologies.
Apprenez à réparer correctement l’actionneur linéaire à moteur pas à pas Thomson sur site. Les unités conçues avec précision combinent un moteur pas à pas hybride et une vis-mère en un boîtier compact, offrant ainsi des avantages évidents avec une solution plus petite, plus solide et plus efficace que les autres technologies.
Technical Articles
-
Leveraging Stepper Motor Linear Actuator Configurability
When designers and integrators need simple, flexible and compact linear actuation, they often turn to stepper motor linear actuators (SMLAs). The high configurability of SMLAs is among their greatest virtues, but sorting through myriad configuration options to tailor the optimal solution for a particular application can be a challenge for even the most seasoned motion engineer. Understanding the unique capabilities and limitations of each type of SMLA will make it easier to take maximum advantage of their wide range of flexibility.
-
Mise en œuvre du guidage antirotation pour les vérins linéaires à moteur pas à pas
L'intégration de moteurs pas à pas dans les vis-mères est une méthode facile et économique pour obtenir un mouvement linéaire précis. Toutefois, un guidage antirotation est nécessaire pour atteindre cette précision. Il doit être ajouté de manière externe par l'utilisateur ou intégré dans la conception par le fabricant. Le choix de l'option appropriée passe par une analyse de votre besoin de système de guidage et une évaluation des avantages et inconvénients de chaque approche.
-
Réduisez vos ensembles de mouvement linéaire en un composant unique grâce aux vérins à vis-mère motorisée
Lorsqu'il s'agit de spécifier un dispositif de mouvement linéaire dans une machine, les concepteurs de systèmes ont le choix entre une multitude d'options. Ce choix peut avoir une incidence sur la facilité d'installation, l'encombrement et le coût d'exploitation. Un mécanisme d'entraînement fréquemment utilisé pour obtenir un mouvement linéaire est un ensemble basé sur un moteur pas à pas et une vis-mère à soutien externe. Mais une approche plus simple et plus facile à installer consisterait à sélectionner un mécanisme d'entraînement avec guidage et soutien intégrés, ce qui permettrait d'éliminer le besoin des composants externes qui assureraient normalement ces fonctions et la complexité associée.
Spécifications de l’actionneur linéaire à moteur pas à pas (unités impériales) :
| S = Vis rotative (MLS), N = Écrou rotatif (MLN) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Course linéaire/ pas complet (μ po) |
Pas hélicoïdal (mm) |
Désignateur de pas hélicoïdal (mm) |
Moteur | |||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | |||||||||
| Désignateur de diamètre [centièmes de po de diamètre] | ||||||||||||
| 18 | 18 | 25 | 25 | 31 | 37 | 31 | 37 | 43 | 50 | |||
| 0.063² | 0.013 | 0013 | S | S,N | S¹³ | S¹³ | S,N¹³ | S,N | S¹³ | |||
| 0.125² | 0.025 | 0025 | S | S,N | S¹ | S,N | S¹³ | |||||
| 0.157 | 0.031 | 0031 | S | S,N | S¹ | S,N | ||||||
| 0.165 | 0.033 | 0033 | S¹ | |||||||||
| 0.179 | 0.036 | 0036 | S | S,N | ||||||||
| 0.200 | 0.040 | 0040 | S¹ | S,N | ||||||||
| 0.209 | 0.042 | 0042 | S | S,N | S¹³ | S¹³ | S,N¹³ | S,N | ||||
| 0.250 | 0.050 | 0050 | S | S,N | S | S,N | S¹ | S,N | S¹³ | S¹³ | ||
| 0.313 | 0.063 | 0063 | S | S,N | S | S,N | S¹ | |||||
| 0.357 | 0.071 | 0071 | S | S,N | ||||||||
| 0.394 | 0.079 | 0079 | S | S,N | S¹ | S,N | ||||||
| 0.417 | 0.083 | 0083 | S | S¹ | S,N | S,N | ||||||
| 0.490 | 0.098 | 0098 | S¹ | |||||||||
| 0.500 | 0.100 | 0100 | S | S,N | S | S,N | S¹ | |||||
| 0.591 | 0.118 | 0118 | S | S,N | ||||||||
| 0.625 | 0.125 | 0125 | S | S,N¹ | S | S,N | S¹ | S,N | S¹ | |||
| 0.787 | 0.157 | 0157 | S | S,N | ||||||||
| 0.833 | 0.167 | 0.167 | S | S | S,N | S,N | ||||||
| 0.960 | 0.192 | 0.192 | S | S,N | ||||||||
| 1.000 | 0.200 | 0200 | S | S,N | S | S,N | S¹ | S,N | S¹ | |||
| 1.180 | 0.236 | 0236 | S¹ | |||||||||
| 1.250 | 0.250 | 0250 | S | S,N | S | S | S,N | S,N | S¹ | S¹ | ||
| 1.500 | 0.300 | 0.300 | S¹ | S,N | ||||||||
| 1.665 | 0.333 | 0.333 | S | S,N¹³ | ||||||||
| 1.875 | 0.375 | 0.375 | S | S,N¹³ | S¹ | S,N | ||||||
| 2.000 | 0.400 | 0.400 | S | S,N | ||||||||
| 2.500 | 0.500 | 0500 | S | S,N¹³ | S | S,N | S | S | S,N | S,N | S¹ | S¹ |
| 3.750 | 0.750 | 0750 | S | S,N | S¹³ | S,N | ||||||
| 4.000 | 0.800 | 0.800 | S¹³ | |||||||||
| 5.000 | 1.000 | 1000 | S³ | S³ | S,N³ | S,N³ | S¹³ | |||||
| 6.000 | 1.200 | 1.200 | S¹³ | S,N | ||||||||
| 7.500 | 1.500 | 1.500 | S¹³ | |||||||||
1. Certains pas hélicoïdaux sont susceptibles de ne pas être disponibles dans un matériau d'écrou hautes performances, dans des configurations à écrou rotatif (MLN) ou dans certains écrous anti-jeu. Contactez Thomson pour plus d'informations.
2. Les vis-mères à pas fin peuvent présenter des capacités de charge nettement inférieures à celles des vis-mères traditionnelles.
3. Vis-mère non disponible en modèle de précision (P)
Spécifications de l’actionneur linéaire à moteur pas à pas (unités métriques) :
| S = Vis rotative (MLS), N = Écrou rotatif (MLN) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Course linéaire/ pas complet (mm) |
Pas hélicoïdal (mm) |
Désignateur de pas hélicoïdal² (mm) |
Moteur | ||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | ||||||||
| Désignateur de diamètre | |||||||||||
| M04 | M04 | M06 | M06 | M08 | M10 | M08 | M10 | M12 | |||
| 3 | 0.6 | 006 | S | S,N | |||||||
| 5 | 1.0 | 010 | S | S,N | S | S,N | |||||
| 6 | 1.2 | 012 | S | S,N | |||||||
| 10 | 2.0 | 020 | S | S | S,N | S,N | S¹ | ||||
| 15 | 3.0 | 030 | S | S,N | S¹ | ||||||
| 20 | 4.0 | 040 | S | S,N | S | S,N | S¹ | ||||
| 25 | 5.0 | 050 | S | S,N | |||||||
| 30 | 6.0 | 060 | S | S,N | S¹ | S,N | S¹ | ||||
| 40 | 8.0 | 080 | S³ | S,N³ | S | S,N | |||||
| 50 | 10.0 | 100 | S | S,N | S¹ | ||||||
| 60 | 12.0 | 120 | S | S,N | S | S¹ | S,N | S,N | |||
| 75 | 15.0 | 150 | S¹ | ||||||||
| 80 | 16.0 | 160 | S¹ | ||||||||
| 90 | 18.0 | 180 | S | S,N | |||||||
| 100 | 20.0 | 200 | S³ | S | S,N³ | S,N | |||||
| 125 | 25.0 | 250 | S¹³ | ||||||||
| 175 | 35.0 | 350 | S¹³ | S,N | |||||||
| 225 | 45.0 | 450 | S¹³ | ||||||||
1. Certains pas hélicoïdaux sont susceptibles de ne pas être disponibles dans un matériau d'écrou hautes performances, dans des configurations à écrou rotatif (MLN) ou dans certains écrous anti-jeu. Contactez Thomson pour plus d'informations.
3. Vis-mère non disponible en modèle de précision (P)
Caractéristiques de l’actionneur linéaire à moteur pas à pas
- Densité de couple accrue
- Efficacité accrue
- Vis rotative ou écrou rotatif
- Tailles/pas hélicoïdaux personnalisés disponibles
- L'avantage Taper Lock
- Réduction du bruit
- Disponible en dimensions pouces et métriques
Champs d'application
- Équipements médicaux
- Étages X-Y
- Impression 3D
- Vannes de contrôle des systèmes CVC
- Dispositifs de pipetage
- Machines CNC
- Pompes à seringue/fluide
Choisissez votre modèle CAO :
MLS

MLN
