

Lorsque les concepteurs et les intégrateurs ont besoin d'une solution d'actionnement linéaire simple, flexible et compacte, ils se tournent souvent vers les vérins linéaires à moteur pas à pas (SMLA). La configurabilité élevée des SMLA fait partie de leurs plus grandes qualités, mais le tri à opérer dans la myriade d'options de configuration pour créer la solution idéale pour une application donnée peut représenter un véritable défi pour l'ingénieur en mouvement même le plus aguerri. Comprendre les capacités et limites uniques de chaque type de SMLA permet de tirer plus facilement le meilleur parti de leur vaste plage de flexibilité.
Pourquoi des SMLA ?
De nombreux facteurs font des SMLA un choix à privilégier pour l'actionnement linéaire, notamment leurs niveaux élevés de personnalisation et de configurabilité, qui sont les facteurs les plus importants. Leur conception efficace permet la configuration d'innombrables options de moteur, de vis-mère et d'écrou d'entraînement dans un ensemble unique pour chaque application.
Les SMLA sont également populaires, car le moteur pas à pas permet un niveau de contrôle de base sans nécessiter de dispositifs de rétroaction externes, comme des codeurs. Le concepteur peut programmer un moteur pas à pas pour qu'il atteigne une position précise à diverses résolutions sans nécessiter une quelconque rétroaction de la part d'un pilote ou d'un contrôleur. Le coût global et la complexité générale peuvent être réduits par rapport aux options de servomoteurs et de moteurs à courant continu sans balais et autres.
De même, les moteurs pas à pas et les vis-mères affichent également une compatibilité naturelle, ce qui contribue à la configurabilité élevée du SMLA. Cette adéquation naturelle est évidente lorsqu'il est question de plages de vitesses, de capacités de charge et de précisions de positionnement optimales.
De surcroît, les vis-mères et les moteurs pas à pas offrent de nombreuses options de personnalisation. Par exemple, les vis-mères peuvent être personnalisées en matière d'usinage des extrémités, de revêtement, de précision, de forme et de longueur du filetage. Les moteurs pas à pas disposent, quant à eux, d'options permettant d'optimiser les bobinages du moteur pour le couple et la vitesse, et de spécifier le câblage, les connecteurs, les codeurs et l'usinage des embouts d'extrémité spécifiques à l'application. L'intégration des vis-mères dans les moteurs pas à pas augmente considérablement le nombre de conceptions possibles.
Types de SMLA
Bien que le nombre de combinaisons possibles soit élevé, les SMLA sont généralement disponibles en trois types distincts : à vis rotative, à écrou rotatif et télescopique. (Figure 1)
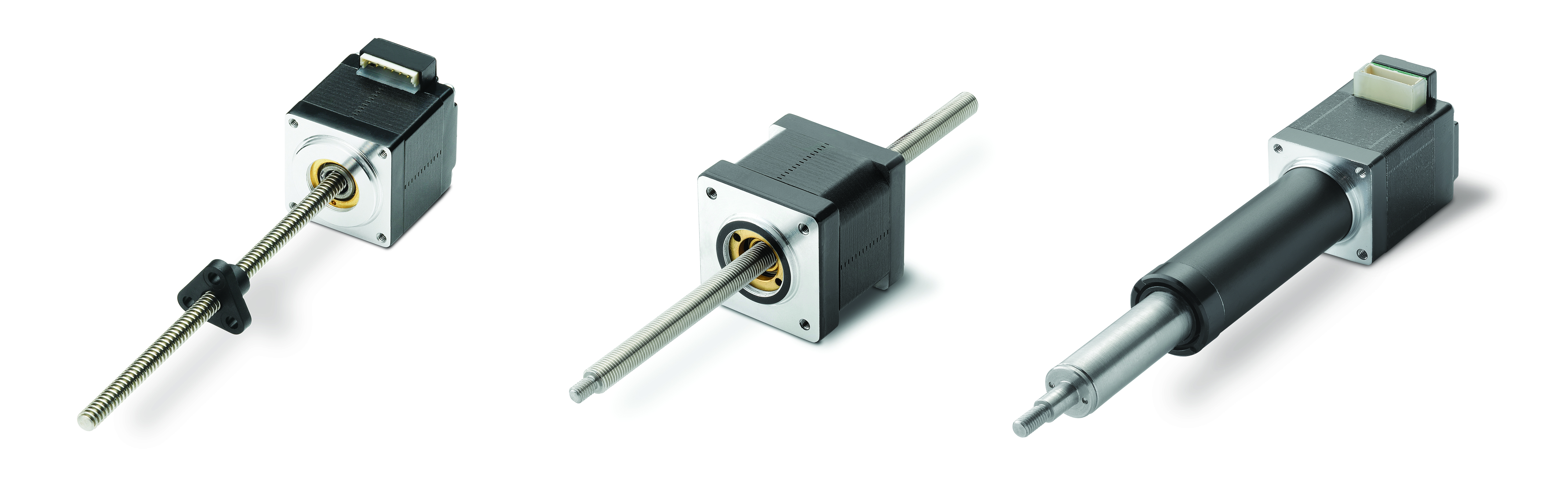
Figure 1. Les trois types de SMLA (de gauche à droite : à vis rotative, à écrou rotatif et télescopique) disposent chacun d'une mécanique distincte qui en fait le choix idéal pour des applications très diverses.
Chaque type de SMLA comprend les mêmes composants généraux : un moteur pas à pas (1), une vis-mère (2) et un écrou d'entraînement (3), mais, comme le montrent les Figures 2 à 4, les mécaniques de base diffèrent en fonction du rôle de l'écrou.
Structure et mécanique de la version à vis rotative
La configuration à vis rotative, également appelée vis-mère motorisée, vérin linéaire externe, écrou externe ou écrou translateur, permet les niveaux les plus élevés de flexibilité et de personnalisation de la conception. Comme son nom l'indique, l'actionnement se produit lorsque la vis-mère tourne. Lorsqu'il est correctement retenu pour éviter qu'il ne tourne avec la vis-mère, l'écrou d'entraînement se déplace sur la longueur filetée de la vis-mère.
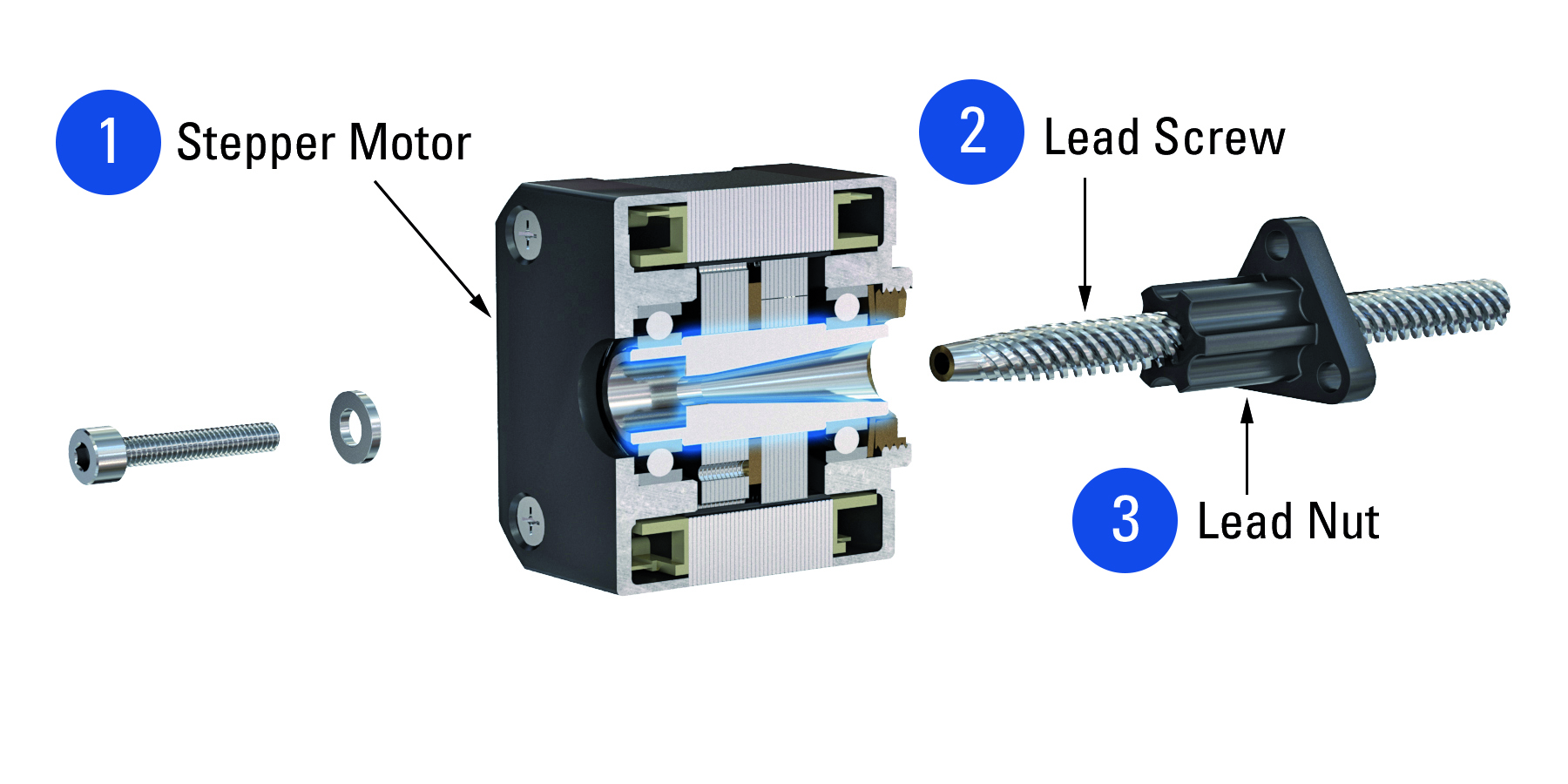
Figure 2. Vue en coupe d'une configuration à vis rotative.
Structure et mécanique de la version à écrou rotatif
L'ensemble à écrou rotatif représente la conception la plus minimaliste et compacte des trois configurations. Cette conception permet la longueur rétractée et totale la plus courte, tout en ne présentant aucune rotation visible ou presque de tous ses composants. Ce type de vérin est également appelé écrou d'entraînement motorisé, écrou interne non captif et vis translatrice.
La mécanique d'un SMLA à écrou rotatif est fondamentalement l'inverse de la configuration à vis rotative. Lorsque le moteur est entraîné, l'écrou d'entraînement intégré dans l'arbre du moteur tourne et provoque la translation de la vis-mère fixée à une charge vers le moteur et en dehors de celui-ci.
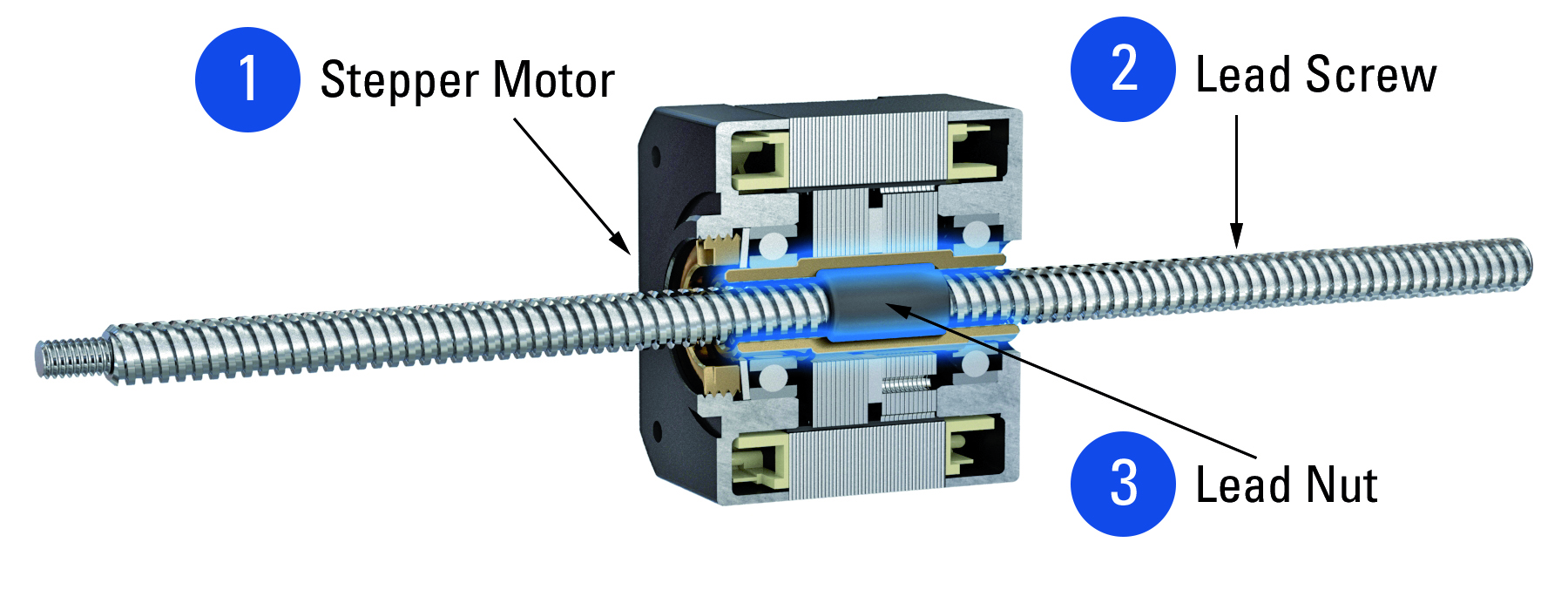
Figure 3. Vue en coupe d'une configuration à écrou rotatif.
Structure et mécanique de la version télescopique
Les vérins de type télescopique sont prévus pour fonctionner davantage comme les vérins traditionnels à tige présents dans la plupart des applications industrielles, tout en offrant néanmoins les avantages d'un moteur pas à pas configurable et d'une unité basée sur une vis-mère. Fondamentalement, le vérin télescopique est une configuration à vis rotative dotée de composants de boîtier supplémentaires qui « capturent » l'écrou d'entraînement sur une cannelure et utilisent une bague interne pour apporter un certain support des charges latérales et de moment. Étant donné que ces configurations intègrent le guidage et le support directement dans leur conception, très souvent, elles n'ont pas besoin des composants externes qui pourraient être requis sans cela. Ce type de vérin est également appelé vérin à vis-mère motorisée, tige électrique captive et vérin électrique.
La mécanique d'un SMLA télescopique est similaire à celle d'une configuration à vis rotative. La principale différence consiste en ce que sa configuration intègre des composants de guidage et de support sous la forme d'un tube de protection cannelé et d'un tube d'extension doté d'une bague de support, qui permet le mouvement sans nécessiter de composants externes.
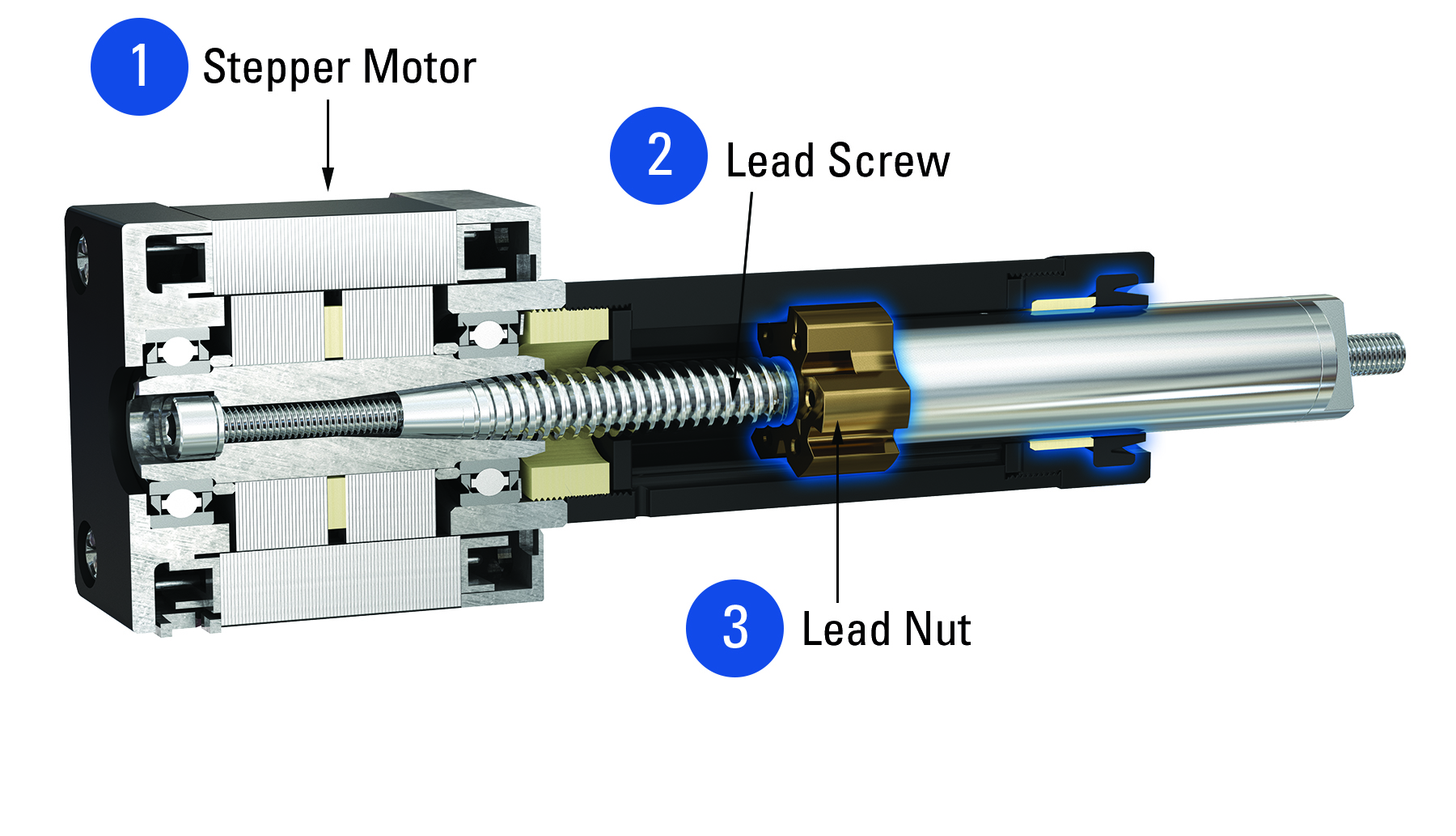
Figure 4. Vue en coupe d'une configuration télescopique.
Installation
Les trois configurations de SMLA présentent toutes un processus d'installation similaire, qui se compose principalement du montage du moteur, du support de la vis-mère si nécessaire et de la fixation de la charge. La principale différence réside dans la position de fixation de la charge et dans la manière dont elle est supportée. (Figure 5) Pour les configurations à vis rotative, la charge se fixe sur l'écrou d'entraînement et l'extrémité de la vis-mère doit être supportée par un roulement ou une bague pour les grandes longueurs.
Pour les configurations à écrou rotatif, la charge est fixée sur la vis-mère. Pour la configuration télescopique, la charge est fixée sur le montage d'extrémité, sur le tube d'extension.
Les deux configurations à vis rotative et à écrou rotatif sont prévues pour supporter des charges axiales uniquement ; un guidage et un support sous la forme de roulements linéaires et de rails de guidage sont requis pour offrir un fonctionnement correct. Le guidage et le support étant généralement intégrés dans les vérins télescopiques, il est possible d'éliminer la nécessité des roulements linéaires et des rails de guidage dans la plupart des scénarios.
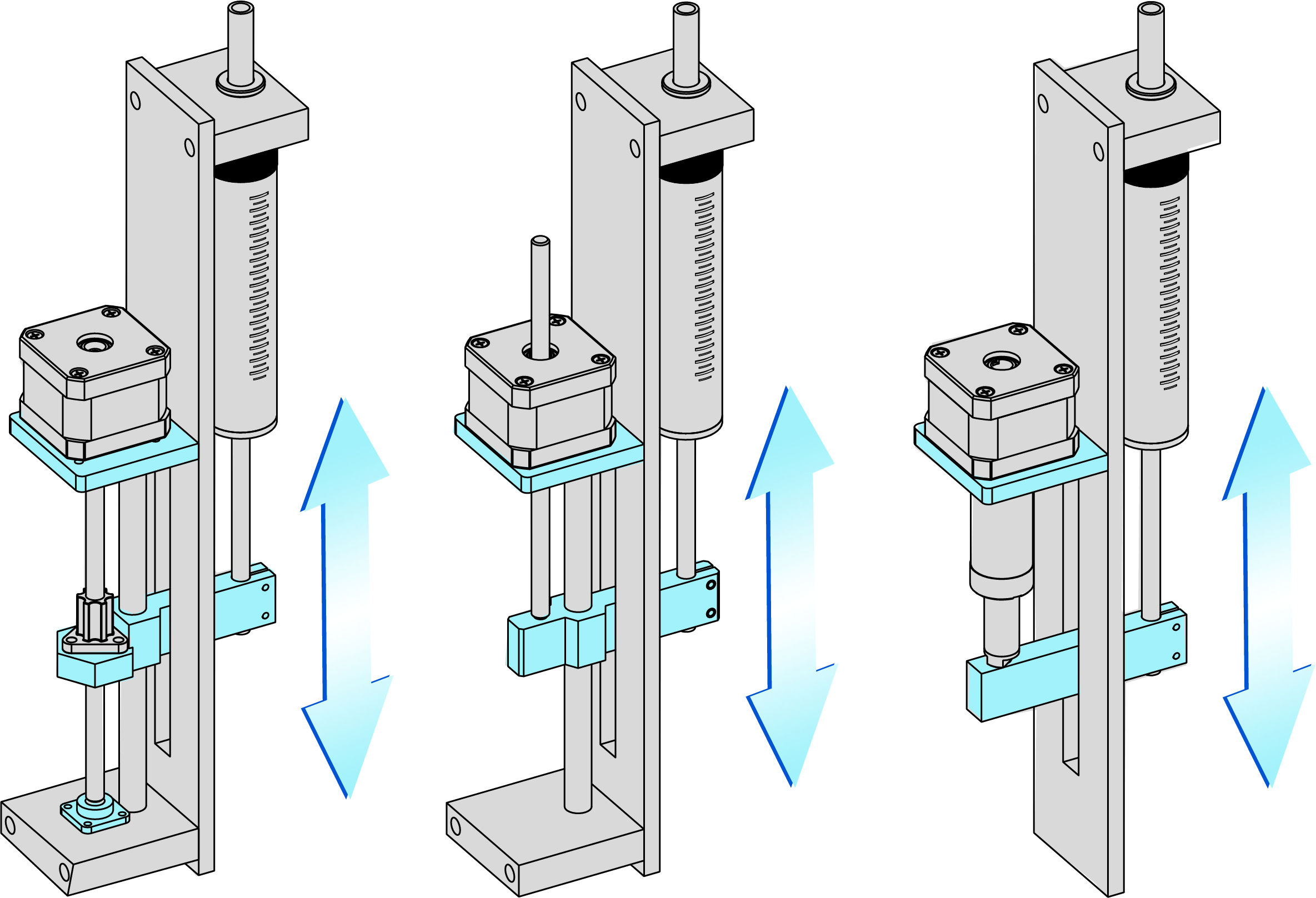
Figure 5. Cet exemple d'application de pompe à fluide illustre les configurations de montage typiques des trois SMLA (de gauche à droite : à vis rotative, à écrou rotatif, télescopique).
Dimensionnement pour les applications
Les niveaux élevés de personnalisation et de configurabilité des SMLA induisent d'innombrables possibilités d'application. La Figure 6 illustre quelques exemples courants d'applications des SMLA.
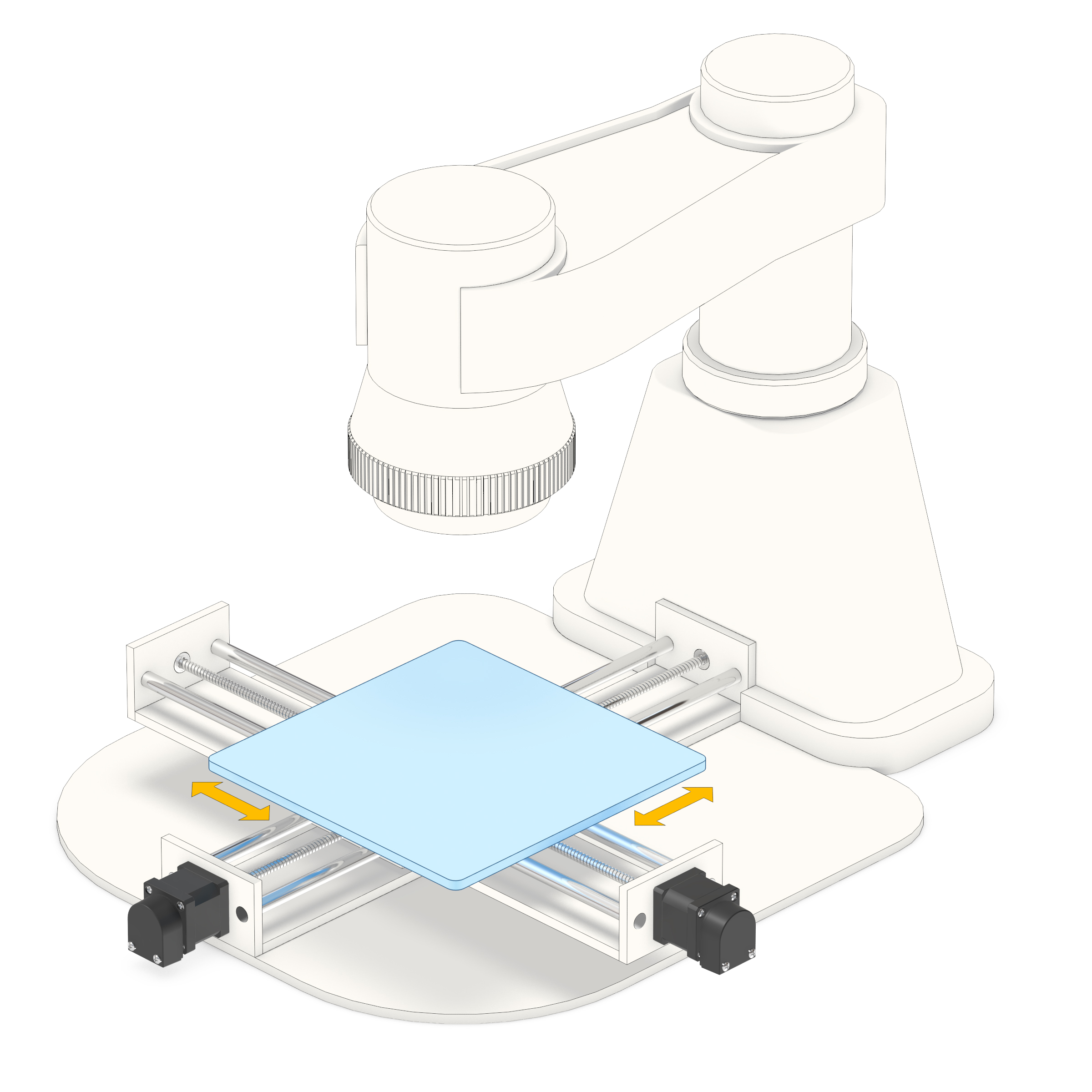
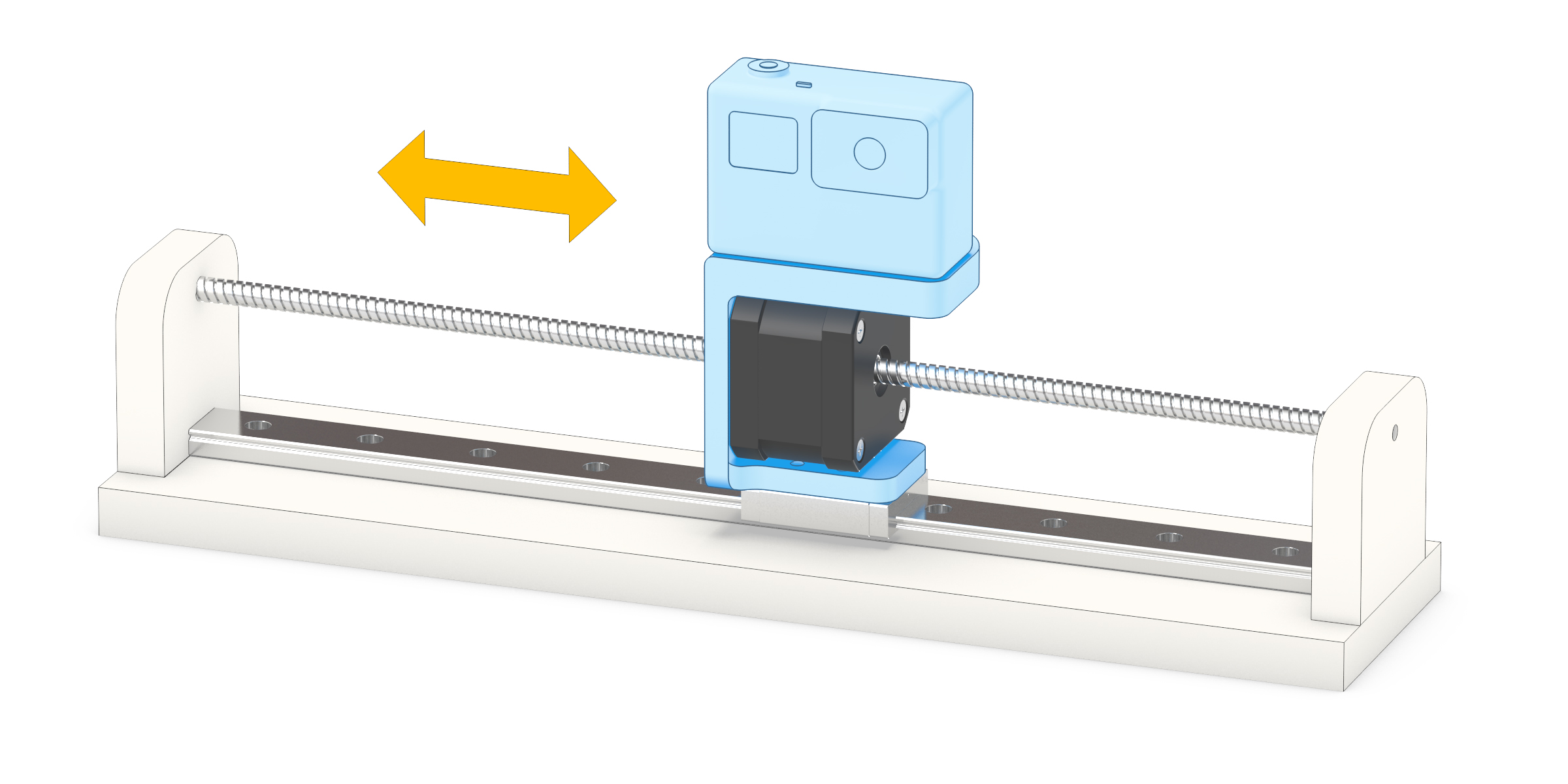
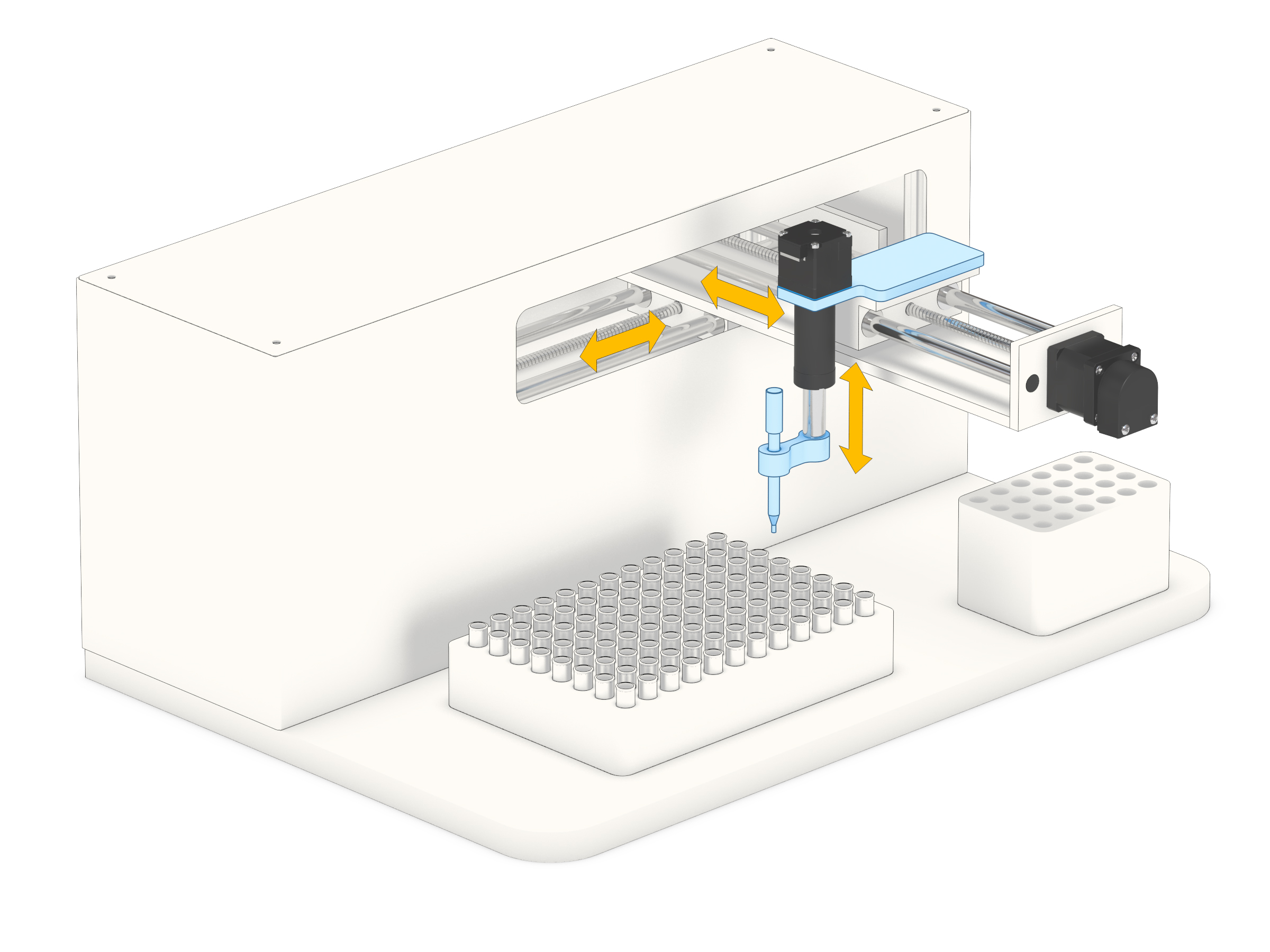
Figure 6. En réduisant le nombre total de composants nécessaires, les SMLA conviennent parfaitement à une grande variété d'applications dans lesquelles l'espace est important, notamment (de gauche à droite) : platine XY (vis rotatives), positionnement horizontal (écrou rotatif) et pipetage de liquide (télescopique et vis rotative).
De fait, le dimensionnement d'un SMLA pour une application spécifique implique principalement de comprendre les limites liées au moteur, à la vis-mère et à l'écrou d'entraînement. Chacun de ces composants essentiels doit être convenablement dimensionné pour garantir un fonctionnement correct et une durée de vie optimale. Heureusement, la plupart des fabricants fournissent des données de performances théoriques relatives à ces composants, facilitant ainsi grandement le dimensionnement rapide d'un vérin. Ces données prennent généralement la forme d'une courbe de rapport vitesse-charge et soulignent la plage de performances optimales de la combinaison moteur-vis-écrou.
Comparaison des SMLA
Les SMLA permettent une approche modulaire de la conception des systèmes de mouvement, que les ingénieurs utilisent pour obtenir une solution hautement personnalisée en fonction des exigences spécifiques de l'application. La détermination du meilleur SMLA parmi les trois dépend de nombreux facteurs liés à l'application.
Ceux qui recherchent une personnalisation maximale ou une combinaison vraiment unique de composants doivent envisager les vérins à vis rotative. Les conceptions à vis rotative constituent le type de SMLA le plus communément déployé, de telle sorte que de nombreux ingénieurs connaîtront déjà bien ces dispositifs.
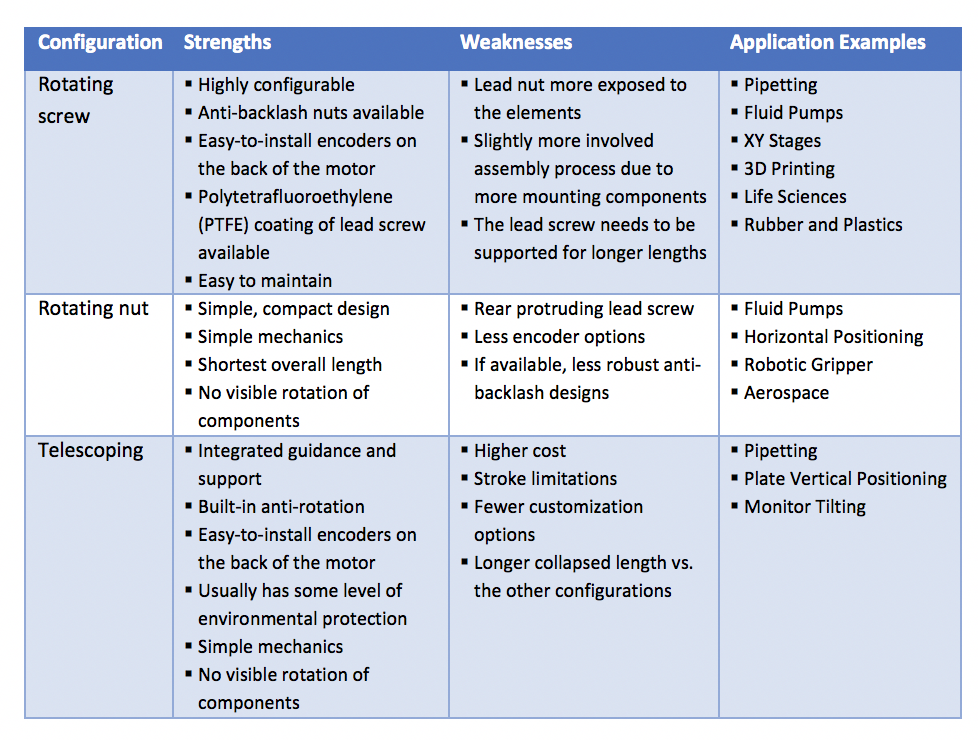
Les applications qui tireront parti d'un vérin plus compact et simple, et qui ne nécessitent pas d'écrou anti-jeu ou de nombreuses options de codeur, pourraient être mieux servies par les conceptions à écrou rotatif. Les ingénieurs préférant s'appuyer sur une conception plus traditionnelle de vérin à tige, dont les applications profiteraient du guidage, de la prise et de l'anti-rotation intégrés, doivent envisager la conception télescopique. Cette configuration vaut également la peine d'être envisagée si la réduction du nombre global de composants est importante, car les composants de guidage/support intégrés éliminent la nécessité d'acheter des composants externes. Le Tableau 1 résume les forces et faiblesses les plus courantes de chaque configuration de SMLA, ainsi que quelques exemples d'applications fréquentes.
Pour aider les concepteurs et les intégrateurs à s'y retrouver parmi les nombreuses options, les fabricants de SMLA proposent de plus en plus souvent des outils en ligne qui leur permettent de configurer rapidement et facilement des solutions pour leurs applications. Ce sont, par exemple, des outils de sélection en ligne qui permettent aux utilisateurs d'identifier le SMLA adapté à leur application en quelques minutes, tout en accédant immédiatement aux caractéristiques de performances, aux modèles 3D, aux tarifs et aux délais d'exécution.
L'utilisation d'outils de sélection automatisés afin de comprendre la conception, la mécanique, l'installation et le dimensionnement des trois principaux types de SMLA peut permettre de guider les concepteurs et intégrateurs de mouvement vers le choix optimal pour leurs applications.
Lorsque les concepteurs et les intégrateurs ont besoin d'une solution d'actionnement linéaire simple, flexible et compacte, ils se tournent souvent vers les vérins linéaires à moteur pas à pas (SMLA). La configurabilité élevée des SMLA fait partie de leurs plus grandes qualités, mais le tri à opérer dans la myriade d'options de configuration pour créer la solution idéale pour une application donnée peut représenter un véritable défi pour l'ingénieur en mouvement même le plus aguerri. Comprendre les capacités et limites uniques de chaque type de SMLA permet de tirer plus facilement le meilleur parti de leur vaste plage de flexibilité.
Pourquoi des SMLA ?
De nombreux facteurs font des SMLA un choix à privilégier pour l'actionnement linéaire, notamment leurs niveaux élevés de personnalisation et de configurabilité, qui sont les facteurs les plus importants. Leur conception efficace permet la configuration d'innombrables options de moteur, de vis-mère et d'écrou d'entraînement dans un ensemble unique pour chaque application.
Les SMLA sont également populaires, car le moteur pas à pas permet un niveau de contrôle de base sans nécessiter de dispositifs de rétroaction externes, comme des codeurs. Le concepteur peut programmer un moteur pas à pas pour qu'il atteigne une position précise à diverses résolutions sans nécessiter une quelconque rétroaction de la part d'un pilote ou d'un contrôleur. Le coût global et la complexité générale peuvent être réduits par rapport aux options de servomoteurs et de moteurs à courant continu sans balais et autres.
De même, les moteurs pas à pas et les vis-mères affichent également une compatibilité naturelle, ce qui contribue à la configurabilité élevée du SMLA. Cette adéquation naturelle est évidente lorsqu'il est question de plages de vitesses, de capacités de charge et de précisions de positionnement optimales.
De surcroît, les vis-mères et les moteurs pas à pas offrent de nombreuses options de personnalisation. Par exemple, les vis-mères peuvent être personnalisées en matière d'usinage des extrémités, de revêtement, de précision, de forme et de longueur du filetage. Les moteurs pas à pas disposent, quant à eux, d'options permettant d'optimiser les bobinages du moteur pour le couple et la vitesse, et de spécifier le câblage, les connecteurs, les codeurs et l'usinage des embouts d'extrémité spécifiques à l'application. L'intégration des vis-mères dans les moteurs pas à pas augmente considérablement le nombre de conceptions possibles.
Types de SMLA
Bien que le nombre de combinaisons possibles soit élevé, les SMLA sont généralement disponibles en trois types distincts : à vis rotative, à écrou rotatif et télescopique. (Figure 1)
Figure 1. Les trois types de SMLA (de gauche à droite : à vis rotative, à écrou rotatif et télescopique) disposent chacun d'une mécanique distincte qui en fait le choix idéal pour des applications très diverses.
Chaque type de SMLA comprend les mêmes composants généraux : un moteur pas à pas (1), une vis-mère (2) et un écrou d'entraînement (3), mais, comme le montrent les Figures 2 à 4, les mécaniques de base diffèrent en fonction du rôle de l'écrou.
Structure et mécanique de la version à vis rotative
La configuration à vis rotative, également appelée vis-mère motorisée, vérin linéaire externe, écrou externe ou écrou translateur, permet les niveaux les plus élevés de flexibilité et de personnalisation de la conception. Comme son nom l'indique, l'actionnement se produit lorsque la vis-mère tourne. Lorsqu'il est correctement retenu pour éviter qu'il ne tourne avec la vis-mère, l'écrou d'entraînement se déplace sur la longueur filetée de la vis-mère.
Figure 2. Vue en coupe d'une configuration à vis rotative.
Structure et mécanique de la version à écrou rotatif
L'ensemble à écrou rotatif représente la conception la plus minimaliste et compacte des trois configurations. Cette conception permet la longueur rétractée et totale la plus courte, tout en ne présentant aucune rotation visible ou presque de tous ses composants. Ce type de vérin est également appelé écrou d'entraînement motorisé, écrou interne non captif et vis translatrice.
La mécanique d'un SMLA à écrou rotatif est fondamentalement l'inverse de la configuration à vis rotative. Lorsque le moteur est entraîné, l'écrou d'entraînement intégré dans l'arbre du moteur tourne et provoque la translation de la vis-mère fixée à une charge vers le moteur et en dehors de celui-ci.
Figure 3. Vue en coupe d'une configuration à écrou rotatif.
Structure et mécanique de la version télescopique
Les vérins de type télescopique sont prévus pour fonctionner davantage comme les vérins traditionnels à tige présents dans la plupart des applications industrielles, tout en offrant néanmoins les avantages d'un moteur pas à pas configurable et d'une unité basée sur une vis-mère. Fondamentalement, le vérin télescopique est une configuration à vis rotative dotée de composants de boîtier supplémentaires qui « capturent » l'écrou d'entraînement sur une cannelure et utilisent une bague interne pour apporter un certain support des charges latérales et de moment. Étant donné que ces configurations intègrent le guidage et le support directement dans leur conception, très souvent, elles n'ont pas besoin des composants externes qui pourraient être requis sans cela. Ce type de vérin est également appelé vérin à vis-mère motorisée, tige électrique captive et vérin électrique.
La mécanique d'un SMLA télescopique est similaire à celle d'une configuration à vis rotative. La principale différence consiste en ce que sa configuration intègre des composants de guidage et de support sous la forme d'un tube de protection cannelé et d'un tube d'extension doté d'une bague de support, qui permet le mouvement sans nécessiter de composants externes.
Figure 4. Vue en coupe d'une configuration télescopique.
Installation
Les trois configurations de SMLA présentent toutes un processus d'installation similaire, qui se compose principalement du montage du moteur, du support de la vis-mère si nécessaire et de la fixation de la charge. La principale différence réside dans la position de fixation de la charge et dans la manière dont elle est supportée. (Figure 5) Pour les configurations à vis rotative, la charge se fixe sur l'écrou d'entraînement et l'extrémité de la vis-mère doit être supportée par un roulement ou une bague pour les grandes longueurs.
Pour les configurations à écrou rotatif, la charge est fixée sur la vis-mère. Pour la configuration télescopique, la charge est fixée sur le montage d'extrémité, sur le tube d'extension.
Les deux configurations à vis rotative et à écrou rotatif sont prévues pour supporter des charges axiales uniquement ; un guidage et un support sous la forme de roulements linéaires et de rails de guidage sont requis pour offrir un fonctionnement correct. Le guidage et le support étant généralement intégrés dans les vérins télescopiques, il est possible d'éliminer la nécessité des roulements linéaires et des rails de guidage dans la plupart des scénarios.
Figure 5. Cet exemple d'application de pompe à fluide illustre les configurations de montage typiques des trois SMLA (de gauche à droite : à vis rotative, à écrou rotatif, télescopique).
Dimensionnement pour les applications
Les niveaux élevés de personnalisation et de configurabilité des SMLA induisent d'innombrables possibilités d'application. La Figure 6 illustre quelques exemples courants d'applications des SMLA.
Figure 6. En réduisant le nombre total de composants nécessaires, les SMLA conviennent parfaitement à une grande variété d'applications dans lesquelles l'espace est important, notamment (de gauche à droite) : platine XY (vis rotatives), positionnement horizontal (écrou rotatif) et pipetage de liquide (télescopique et vis rotative).
De fait, le dimensionnement d'un SMLA pour une application spécifique implique principalement de comprendre les limites liées au moteur, à la vis-mère et à l'écrou d'entraînement. Chacun de ces composants essentiels doit être convenablement dimensionné pour garantir un fonctionnement correct et une durée de vie optimale. Heureusement, la plupart des fabricants fournissent des données de performances théoriques relatives à ces composants, facilitant ainsi grandement le dimensionnement rapide d'un vérin. Ces données prennent généralement la forme d'une courbe de rapport vitesse-charge et soulignent la plage de performances optimales de la combinaison moteur-vis-écrou.
Comparaison des SMLA
Les SMLA permettent une approche modulaire de la conception des systèmes de mouvement, que les ingénieurs utilisent pour obtenir une solution hautement personnalisée en fonction des exigences spécifiques de l'application. La détermination du meilleur SMLA parmi les trois dépend de nombreux facteurs liés à l'application.
Ceux qui recherchent une personnalisation maximale ou une combinaison vraiment unique de composants doivent envisager les vérins à vis rotative. Les conceptions à vis rotative constituent le type de SMLA le plus communément déployé, de telle sorte que de nombreux ingénieurs connaîtront déjà bien ces dispositifs.
Les applications qui tireront parti d'un vérin plus compact et simple, et qui ne nécessitent pas d'écrou anti-jeu ou de nombreuses options de codeur, pourraient être mieux servies par les conceptions à écrou rotatif. Les ingénieurs préférant s'appuyer sur une conception plus traditionnelle de vérin à tige, dont les applications profiteraient du guidage, de la prise et de l'anti-rotation intégrés, doivent envisager la conception télescopique. Cette configuration vaut également la peine d'être envisagée si la réduction du nombre global de composants est importante, car les composants de guidage/support intégrés éliminent la nécessité d'acheter des composants externes. Le Tableau 1 résume les forces et faiblesses les plus courantes de chaque configuration de SMLA, ainsi que quelques exemples d'applications fréquentes.
Pour aider les concepteurs et les intégrateurs à s'y retrouver parmi les nombreuses options, les fabricants de SMLA proposent de plus en plus souvent des outils en ligne qui leur permettent de configurer rapidement et facilement des solutions pour leurs applications. Ce sont, par exemple, des outils de sélection en ligne qui permettent aux utilisateurs d'identifier le SMLA adapté à leur application en quelques minutes, tout en accédant immédiatement aux caractéristiques de performances, aux modèles 3D, aux tarifs et aux délais d'exécution.
L'utilisation d'outils de sélection automatisés afin de comprendre la conception, la mécanique, l'installation et le dimensionnement des trois principaux types de SMLA peut permettre de guider les concepteurs et intégrateurs de mouvement vers le choix optimal pour leurs applications.