

Cuando los diseñadores y los integradores necesitan actuadores lineales simples, flexibles y compactos, suelen elegir los actuadores lineales de motores paso a paso (SMLA, por sus siglas en inglés). La alta capacidad de configurar los SMLA está entre una de sus mayores virtudes, pero clasificar entre una infinita cantidad de opciones de configuración para encontrar la solución ideal para una aplicación en particular puede ser un desafío incluso para el ingeniero en movimiento más experimentado. Entender las capacidades y limitaciones únicas de cada tipo de SMLA hará que sea más fácil aprovechar al máximo su amplio rango de flexibilidad.
¿Por qué elegir un SMLA?
Hay muchos factores que hacen que los SMLA sean deseables para los actuadores lineales. Entre los más importantes se encuentran sus altos niveles de personalización y configuración. El eficiente diseño permite incontables opciones de motor, husillos de rosca y tuercas de avance en un conjunto exclusivo para cada aplicación.
Los SMLA también son populares porque el motor paso a paso permite un control de nivel básico sin la necesidad de dispositivos de retroalimentación externos, como los encoders. El diseñador puede programar un motor paso a paso para hacer un movimiento a una posición exacta en varias resoluciones sin la necesidad de que el conductor o controlador reciban retroalimentación. Esto puede hacer que el costo y la complejidad generales sean inferiores a los de los servomotores, los motores CC sin escobillas y otras opciones de motor.
Los motores paso a paso y los husillos de rosca también son naturalmente compatibles, lo cual contribuye a la alta capacidad de configurar los SMLA. Esta combinación natural es evidente cuando se trata de rangos de velocidad óptimos, capacidades de carga y precisión de posicionamiento.
Además, los husillos de rosca y los motores paso a paso ofrecen muchas opciones disponibles de personalización. Los husillos de rosca, por ejemplo, se pueden personalizar en cuanto al mecanizado de extremos, revestimiento, precisión, forma de la rosca y longitud; por su parte, los motores paso a paso ofrecen opciones para optimizar el bobinado del motor para el par y la velocidad, y para especificar el cableado específico para la aplicación, los conectores, los encoders y el mecanizado de las tapas de los extremos. Integrar motores paso a paso con husillos de rosca aumenta notablemente el número de diseños posibles.
Tipos de SMLA
Si bien el número de combinaciones posibles es alto, los SMLA están generalmente disponibles en tres estilos diferentes: husillo giratorio, tuerca giratoria y telescópico. (Figura 1)
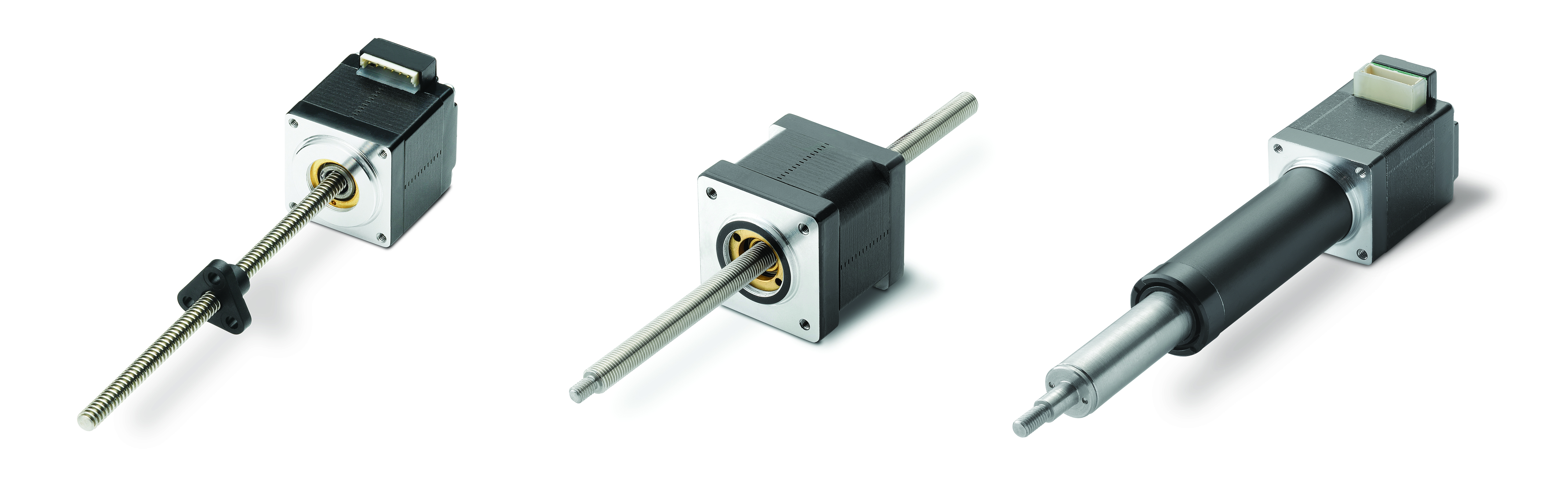
Figura 1.Los tres tipos de SMLA (de izquierda a derecha: husillo giratorio, tuerca giratoria y telescópico) presentan mecanismos exclusivos que los hacen ideales para una gran cantidad de aplicaciones.
En general, cada estilo de SMLA consta de los mismos componentes: un motor paso a paso (1), husillo de rosca (2), tuerca de avance (3), pero tal como se muestra en las Figuras 2 a 4, la mecánica principal varía en función del rol de la tuerca.
Estructura y mecánica del husillo giratorio
La configuración de husillo giratorio, también conocida como husillo de avance motorizado, lineal externa, tuerca externa o tuerca de traslado, permite la mayor flexibilidad de diseño y personalización. Tal como el nombre lo indica, el accionamiento ocurre cuando el husillo giratorio rota. Cuando está bien sujetado a fin de evitar que rote con el husillo de avance, la tuerca de avance se traslada por la longitud roscada del husillo de avance.
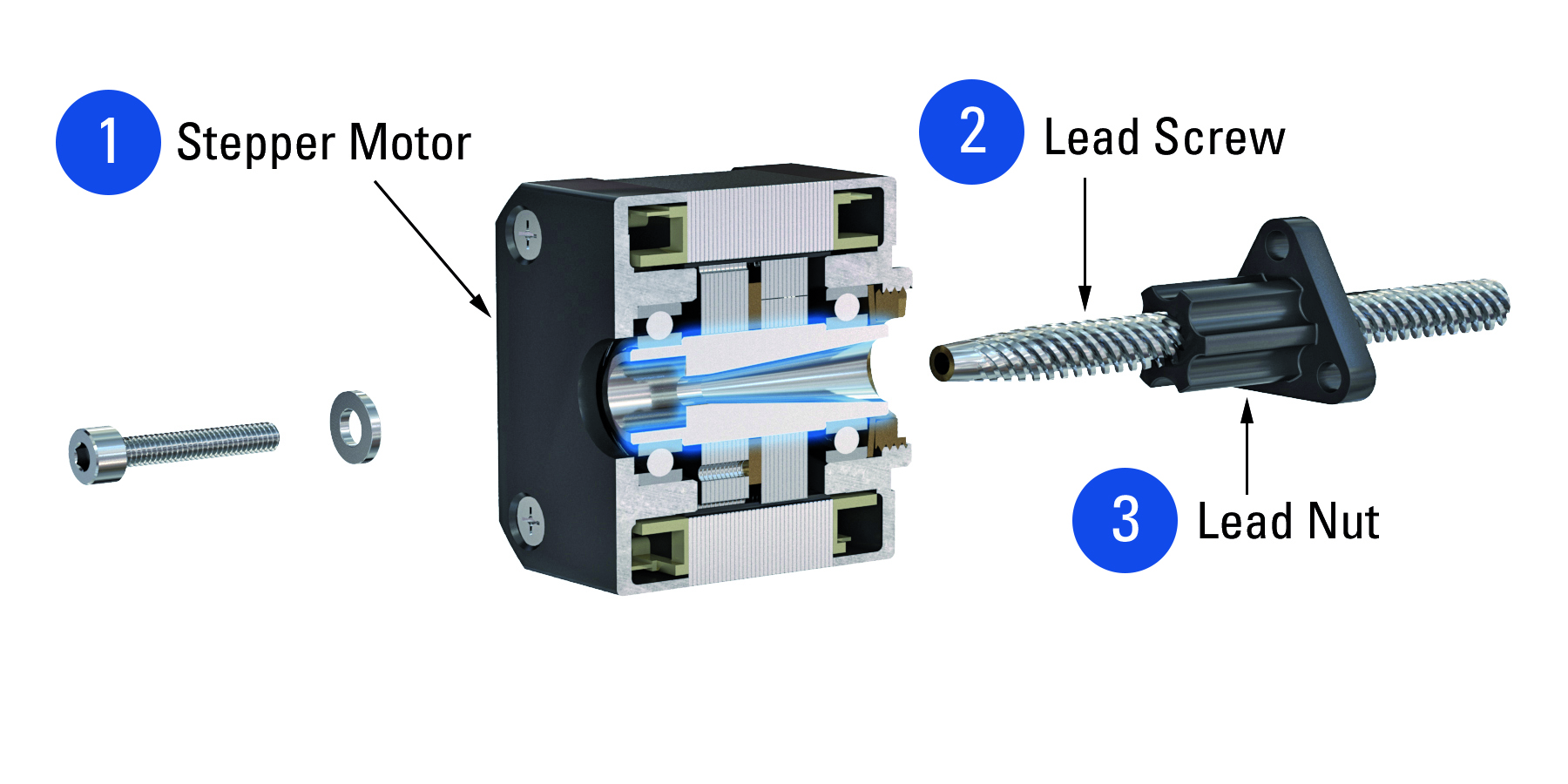
Figura 2. Vista del corte de la configuración de un husillo giratorio.
Estructura y mecánica de una tuerca giratoria
El conjunto de tuerca giratoria tiene el diseño más pequeño y compacto de las tres configuraciones. Este diseño permite la longitud más corta y plegada y, a su vez, casi no tiene rotación visible de ninguno de sus componentes. Otros nombres de este tipo de actuador son tuerca de avance motorizada, tuerca interna libre y husillo de traslado.
La mecánica de un SMLA de tuerca giratoria es básicamente la inversa de la configuración de un husillo giratorio. Cuando el motor se acciona, la tuerca de avance integrada dentro del eje del motor rota y hace que el husillo de avance sujeto a una carga se mueva hacia el motor y fuera de él.
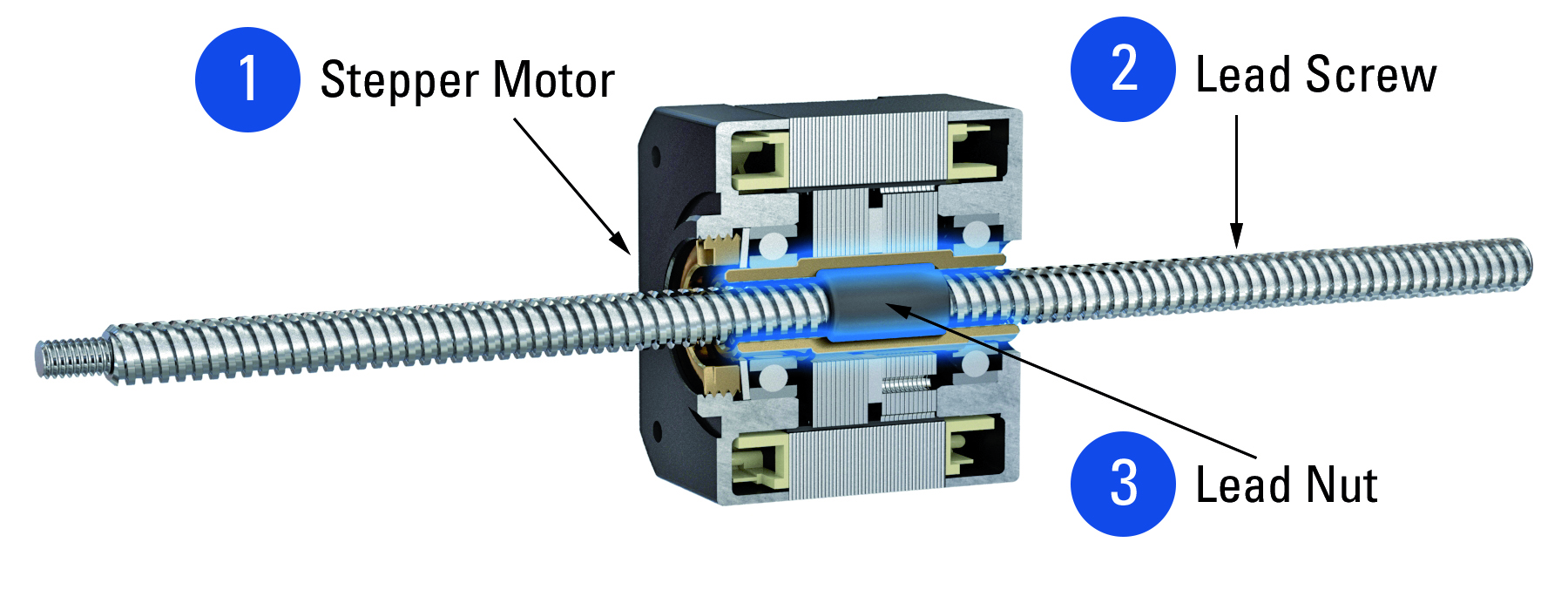
Figura 3. Vista del corte de la configuración de una tuerca giratoria.
Estructura y mecánica del estilo telescópico
Los actuadores estilo telescópico están diseñados para funcionar más como un actuador estilo vástago tradicional que puede encontrarse en la mayoría de las aplicaciones industriales, pero, a su vez, tiene los beneficios de un motor paso a paso y una unidad de avance basada en husillo configurables. Básicamente, el actuador telescópico es una configuración de husillo giratorio con componentes adicionales en la carcasa que "capturan" a la tuerca de avance con un eje nervado y usan un rodamiento interno para brindar algo de apoyo a la carga lateral y de momento. Como estas configuraciones incorporan guía y apoyo directamente en su diseño, en muchos casos, no necesitan componentes externos que, de otra forma, podrían necesitarse. Otros nombres para este estilo de actuador son actuador de husillo de avance motorizado, vástago libre y eléctrico, y cilindro eléctrico.
La mecánica de un SMLA telescópico es similar a la de la configuración de husillo giratorio. La diferencia clave es que esta configuración integra componentes de guía y apoyo en la forma de un tubo de cubierta con eje nervado y un tubo de extensión con rodamiento de apoyo, y esto habilita el movimiento sin la necesidad de componentes externos.
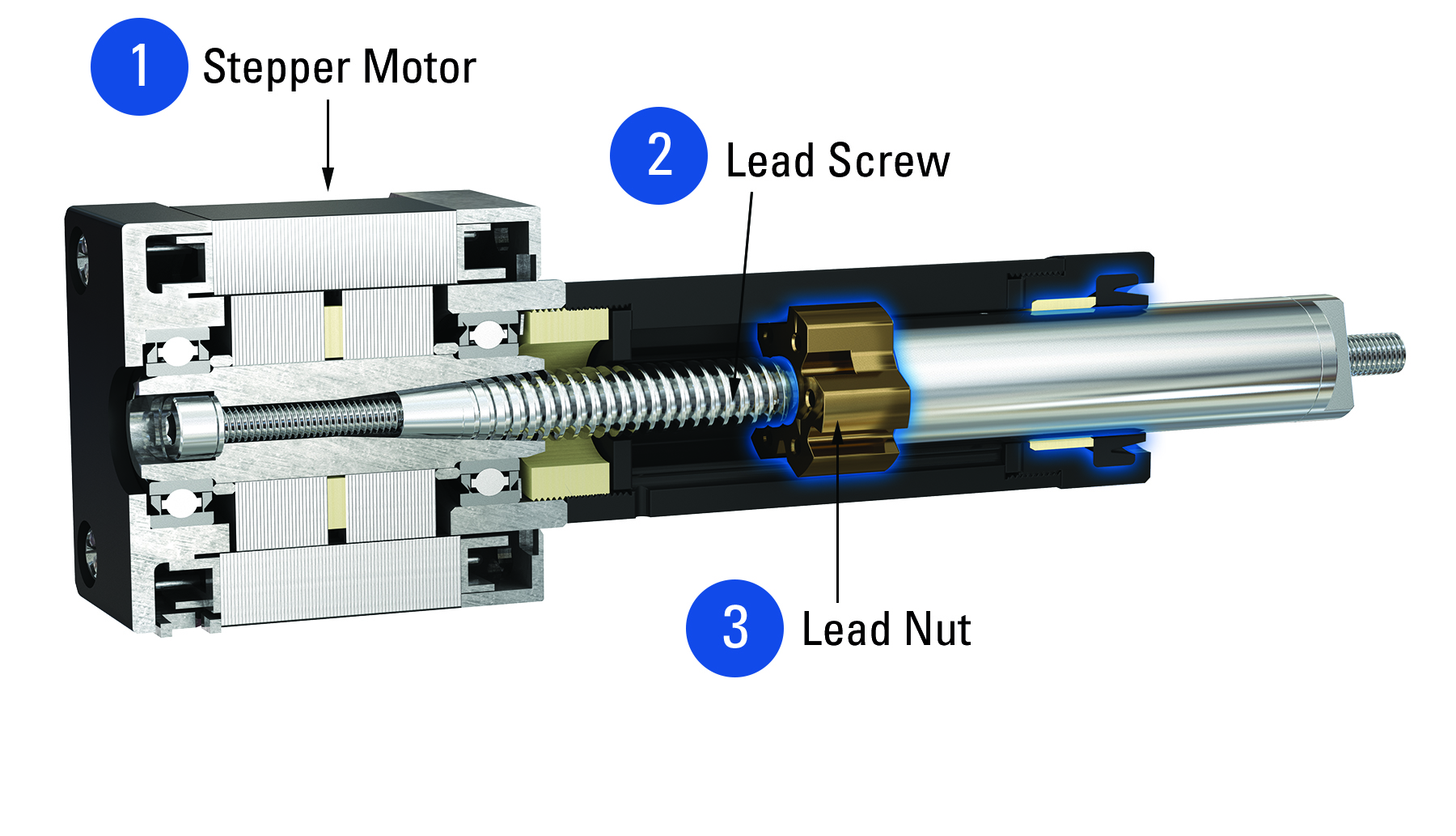
Figura 4. Vista del corte de la configuración del estilo telescópico.
Instalación
Las tres configuraciones de SMLA tienen un proceso de instalación similar que, principalmente, consta de montar el motor, respaldar al husillo de avance si es necesario y adjuntar la carga. Las diferencias clave están en cómo se adjunta y sostiene la carga. (Figura 5) Para las configuraciones de husillo giratorio, la carga se adjunta a la tuerca de avance, y el extremo del husillo de avance deberá estar respaldado con un rodamiento o cojinete para obtener mayor longitud.
Para las configuraciones de tuerca giratoria, la carga se adjunta al husillo de avance. Y para la configuración telescópica, la carga se adjunta al montaje del extremo en el tubo de extensión.
En cuanto a las configuraciones de husillo y tuerca giratorios, se espera que resistan únicamente las cargas axiales, por lo que se necesitará guía y apoyo en la forma de rodamientos lineales y rieles de guía para un funcionamiento apropiado. Como la guía y el apoyo están normalmente integrados a los actuadores telescópicos, la necesidad de rodamientos lineales y rieles de guía se puede suprimir en muchos casos.
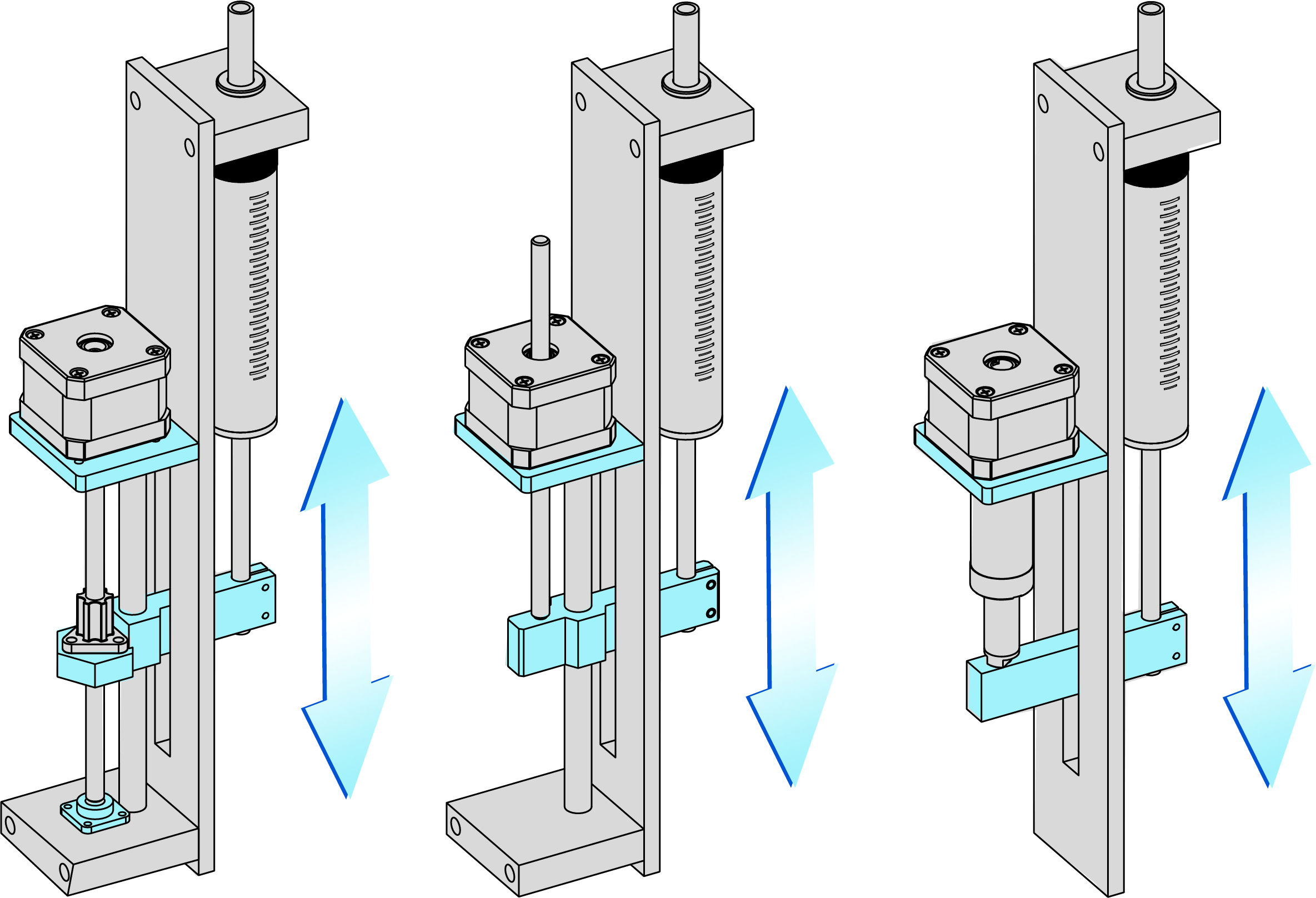
Figura 5. Este ejemplo de aplicación de bomba de fluidos ilustra las configuraciones de montaje típico para los tres SMLA (de izquierda a derecha: husillo giratorio, tuerca giratoria, estilo telescópico).
Dimensionamiento para aplicaciones
Los altos niveles de personalización y configuración de los SMLA conducen a incontables posibilidades de aplicaciones. La figura 6 muestra algunos ejemplos comunes de aplicaciones de SMLA.
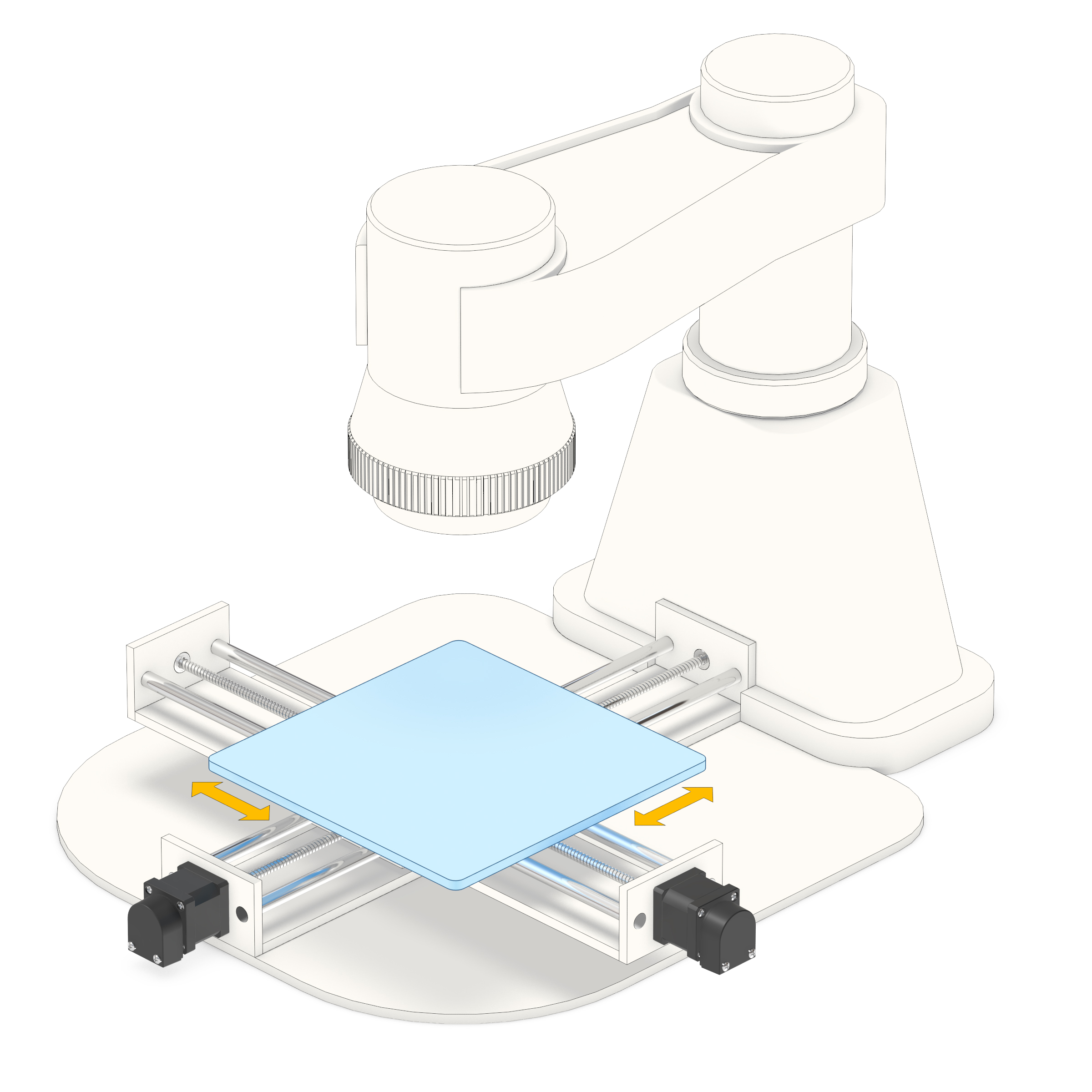
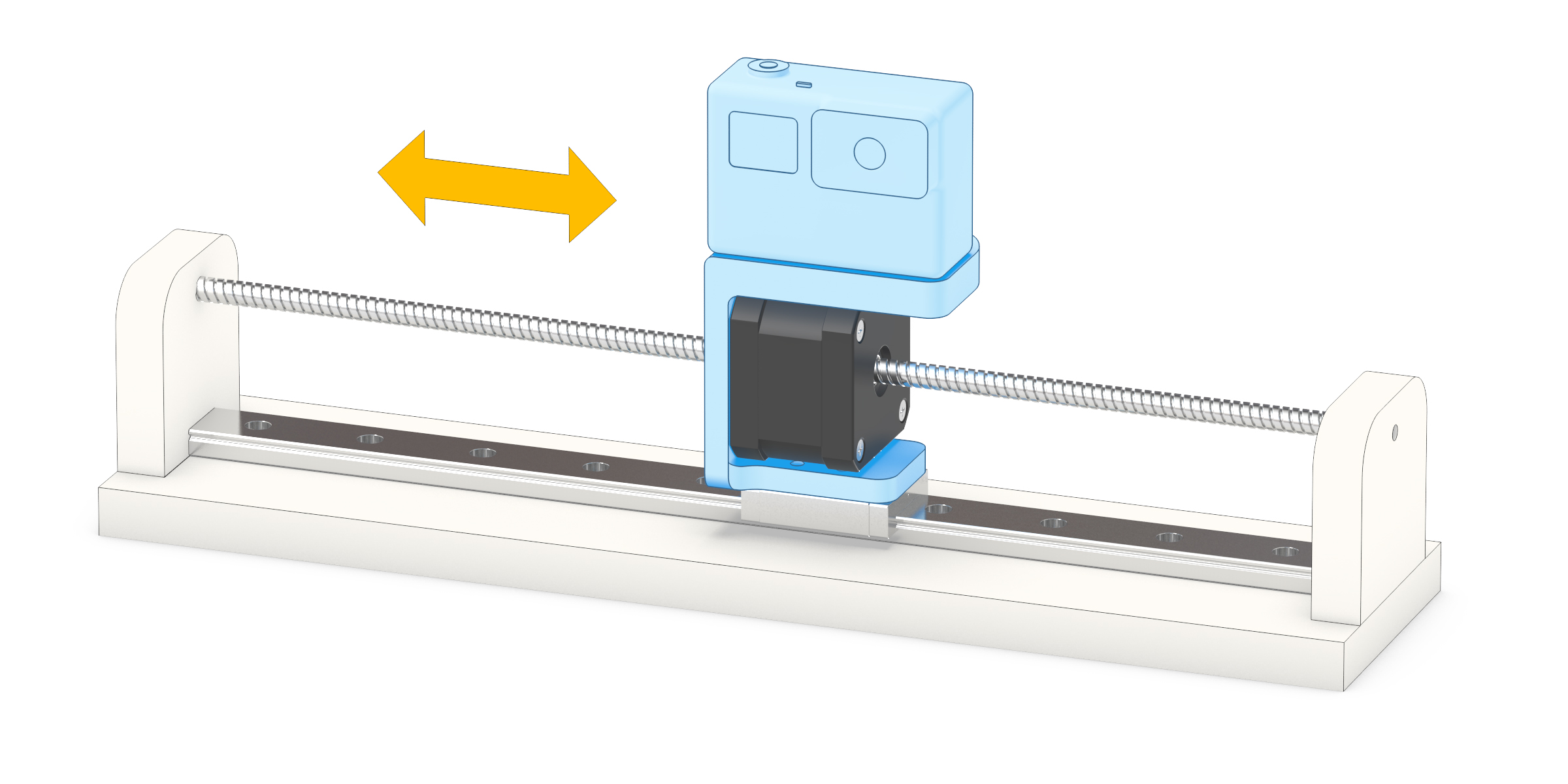
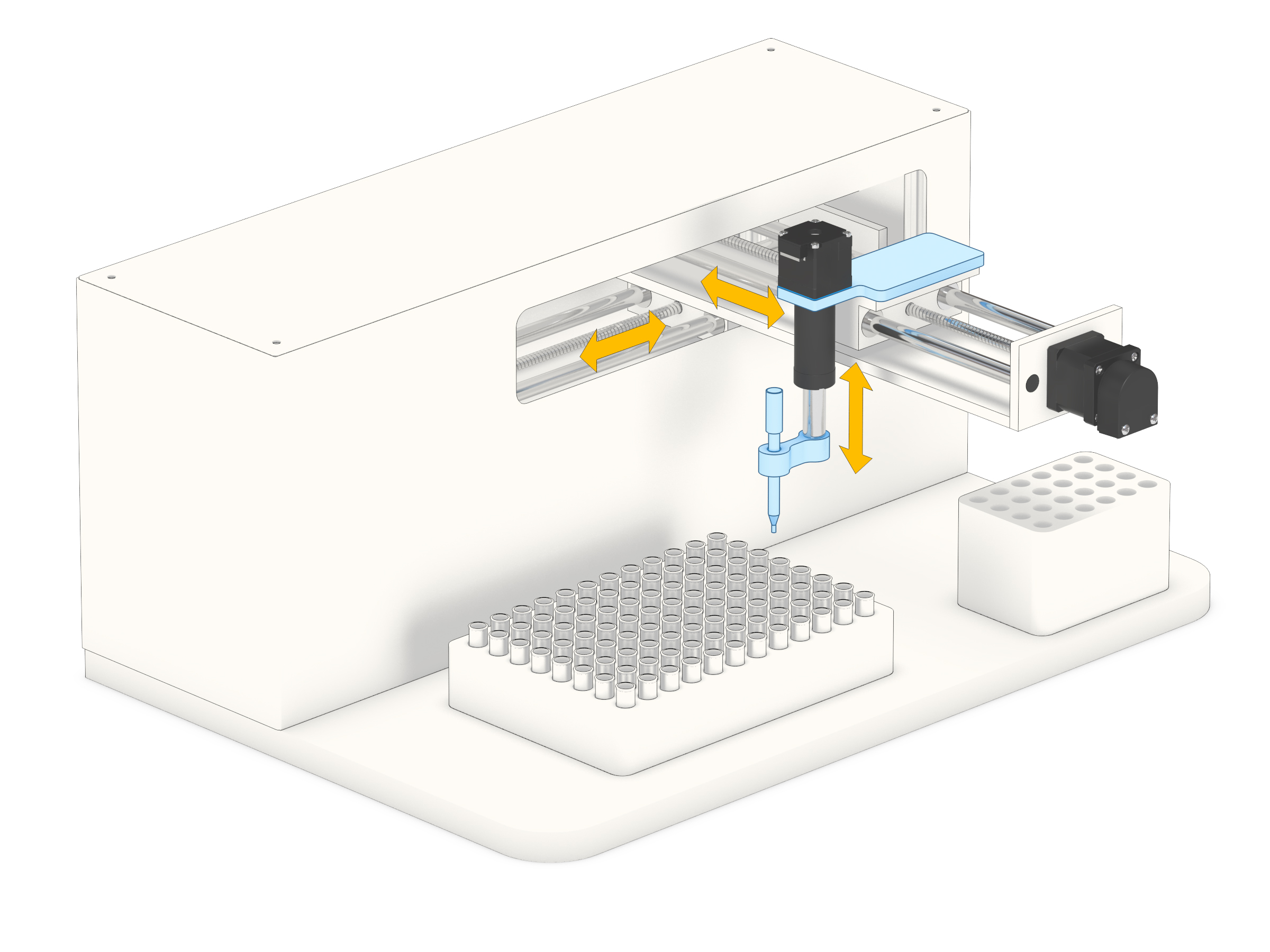
Figura 6. Al reducir el número total de componentes necesarios, los SMLA son ideales para una amplia variedad de aplicaciones con poco espacio, como las siguientes (de izquierda a derecha): etapa XY (husillos giratorios), posicionamiento horizontal (tuerca giratoria) y pipeteo de fluidos (estilo telescópico y husillo giratorio).
Dimensionar un SMLA para una aplicación específica, por lo tanto, implica entender las limitaciones del motor y el husillo y la tuerca de avance. Cada uno de estos componentes fundamentales se debe dimensionar correctamente para garantizar un funcionamiento apropiado y una óptima vida útil. Afortunadamente, la mayoría de los fabricantes ofrecen diagramas teóricos de rendimiento que consideran estos componentes, lo cual hace mucho más sencillo dimensionar un actuador rápidamente. Estos diagramas suelen tomar la forma de una curva de velocidad vs. carga y destacan el rango de rendimiento óptimo de la combinación motor, husillo y tuerca.
Comparación de SMLA
Los SMLA permiten abordar el enfoque de un diseño de sistema de movimiento modular que les permite a los ingenieros obtener una solución que se adapta en gran medida a los requisitos específicos de su aplicación. Determinar cuál de los tres SMLA es el mejor depende de muchos factores de la aplicación.
Aquellos que buscan la máxima personalización o una combinación exclusiva de componentes deberían considerar los actuadores de husillos giratorios. Los diseños de husillos giratorios son los tipos de SMLA más utilizados y, por esto, muchos ingenieros ya están familiarizados con ellos.
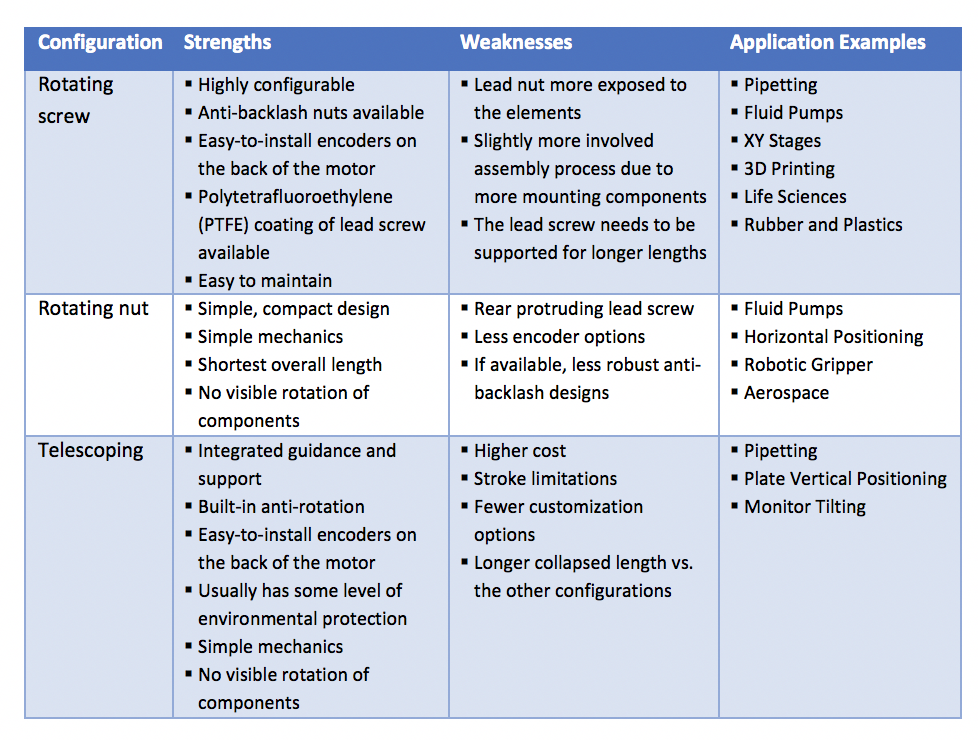
Las aplicaciones que se beneficiarían de un actuador más compacto y simple y que no necesitarían tuerca antijuego o muchas opciones de encoders podrían obtener mejores resultados de los diseños de tuerca giratoria. Los ingenieros que prefieren un diseño de actuador estilo vástago más tradicional y cuyas aplicaciones se beneficiarían de la guía, el apoyo y la antirrotación integrados, deberían considerar el diseño telescópico. Esta configuración también se debe considerar si es importante reducir la cantidad total de componentes, ya que los componentes de guía/apoyo integrados eliminan la necesidad de comprar piezas externas. La tabla 1 resume las fortalezas y debilidades de cada configuración de SMLA, y también incluye ejemplos de aplicaciones comunes.
Para ayudar a los diseñadores e integradores a recorrer la variedad de opciones, los fabricantes de SMLA están ofreciendo cada vez más herramientas en línea para ayudarlos a configurar soluciones rápida y fácilmente para sus aplicaciones. Por ejemplo, hay herramientas selectoras en línea que les permiten a los usuarios identificar el SMLA correcto para su aplicación en cuestión de minutos y, a su vez, pueden acceder a las características de rendimiento, modelos 3D, precios y tiempo de espera.
Utilizar herramientas selectoras automatizadas para entender el diseño, la mecánica, la instalación y el dimensionamiento de los tres tipos principales de SMLA puede ser útil para guiar a los diseñadores e integradores de movimiento a elegir la opción perfecta para sus aplicaciones.
Cuando los diseñadores y los integradores necesitan actuadores lineales simples, flexibles y compactos, suelen elegir los actuadores lineales de motores paso a paso (SMLA, por sus siglas en inglés). La alta capacidad de configurar los SMLA está entre una de sus mayores virtudes, pero clasificar entre una infinita cantidad de opciones de configuración para encontrar la solución ideal para una aplicación en particular puede ser un desafío incluso para el ingeniero en movimiento más experimentado. Entender las capacidades y limitaciones únicas de cada tipo de SMLA hará que sea más fácil aprovechar al máximo su amplio rango de flexibilidad.
¿Por qué elegir un SMLA?
Hay muchos factores que hacen que los SMLA sean deseables para los actuadores lineales. Entre los más importantes se encuentran sus altos niveles de personalización y configuración. El eficiente diseño permite incontables opciones de motor, husillos de rosca y tuercas de avance en un conjunto exclusivo para cada aplicación.
Los SMLA también son populares porque el motor paso a paso permite un control de nivel básico sin la necesidad de dispositivos de retroalimentación externos, como los encoders. El diseñador puede programar un motor paso a paso para hacer un movimiento a una posición exacta en varias resoluciones sin la necesidad de que el conductor o controlador reciban retroalimentación. Esto puede hacer que el costo y la complejidad generales sean inferiores a los de los servomotores, los motores CC sin escobillas y otras opciones de motor.
Los motores paso a paso y los husillos de rosca también son naturalmente compatibles, lo cual contribuye a la alta capacidad de configurar los SMLA. Esta combinación natural es evidente cuando se trata de rangos de velocidad óptimos, capacidades de carga y precisión de posicionamiento.
Además, los husillos de rosca y los motores paso a paso ofrecen muchas opciones disponibles de personalización. Los husillos de rosca, por ejemplo, se pueden personalizar en cuanto al mecanizado de extremos, revestimiento, precisión, forma de la rosca y longitud; por su parte, los motores paso a paso ofrecen opciones para optimizar el bobinado del motor para el par y la velocidad, y para especificar el cableado específico para la aplicación, los conectores, los encoders y el mecanizado de las tapas de los extremos. Integrar motores paso a paso con husillos de rosca aumenta notablemente el número de diseños posibles.
Tipos de SMLA
Si bien el número de combinaciones posibles es alto, los SMLA están generalmente disponibles en tres estilos diferentes: husillo giratorio, tuerca giratoria y telescópico. (Figura 1)
Figura 1.Los tres tipos de SMLA (de izquierda a derecha: husillo giratorio, tuerca giratoria y telescópico) presentan mecanismos exclusivos que los hacen ideales para una gran cantidad de aplicaciones.
En general, cada estilo de SMLA consta de los mismos componentes: un motor paso a paso (1), husillo de rosca (2), tuerca de avance (3), pero tal como se muestra en las Figuras 2 a 4, la mecánica principal varía en función del rol de la tuerca.
Estructura y mecánica del husillo giratorio
La configuración de husillo giratorio, también conocida como husillo de avance motorizado, lineal externa, tuerca externa o tuerca de traslado, permite la mayor flexibilidad de diseño y personalización. Tal como el nombre lo indica, el accionamiento ocurre cuando el husillo giratorio rota. Cuando está bien sujetado a fin de evitar que rote con el husillo de avance, la tuerca de avance se traslada por la longitud roscada del husillo de avance.
Figura 2. Vista del corte de la configuración de un husillo giratorio.
Estructura y mecánica de una tuerca giratoria
El conjunto de tuerca giratoria tiene el diseño más pequeño y compacto de las tres configuraciones. Este diseño permite la longitud más corta y plegada y, a su vez, casi no tiene rotación visible de ninguno de sus componentes. Otros nombres de este tipo de actuador son tuerca de avance motorizada, tuerca interna libre y husillo de traslado.
La mecánica de un SMLA de tuerca giratoria es básicamente la inversa de la configuración de un husillo giratorio. Cuando el motor se acciona, la tuerca de avance integrada dentro del eje del motor rota y hace que el husillo de avance sujeto a una carga se mueva hacia el motor y fuera de él.
Figura 3. Vista del corte de la configuración de una tuerca giratoria.
Estructura y mecánica del estilo telescópico
Los actuadores estilo telescópico están diseñados para funcionar más como un actuador estilo vástago tradicional que puede encontrarse en la mayoría de las aplicaciones industriales, pero, a su vez, tiene los beneficios de un motor paso a paso y una unidad de avance basada en husillo configurables. Básicamente, el actuador telescópico es una configuración de husillo giratorio con componentes adicionales en la carcasa que "capturan" a la tuerca de avance con un eje nervado y usan un rodamiento interno para brindar algo de apoyo a la carga lateral y de momento. Como estas configuraciones incorporan guía y apoyo directamente en su diseño, en muchos casos, no necesitan componentes externos que, de otra forma, podrían necesitarse. Otros nombres para este estilo de actuador son actuador de husillo de avance motorizado, vástago libre y eléctrico, y cilindro eléctrico.
La mecánica de un SMLA telescópico es similar a la de la configuración de husillo giratorio. La diferencia clave es que esta configuración integra componentes de guía y apoyo en la forma de un tubo de cubierta con eje nervado y un tubo de extensión con rodamiento de apoyo, y esto habilita el movimiento sin la necesidad de componentes externos.
Figura 4. Vista del corte de la configuración del estilo telescópico.
Instalación
Las tres configuraciones de SMLA tienen un proceso de instalación similar que, principalmente, consta de montar el motor, respaldar al husillo de avance si es necesario y adjuntar la carga. Las diferencias clave están en cómo se adjunta y sostiene la carga. (Figura 5) Para las configuraciones de husillo giratorio, la carga se adjunta a la tuerca de avance, y el extremo del husillo de avance deberá estar respaldado con un rodamiento o cojinete para obtener mayor longitud.
Para las configuraciones de tuerca giratoria, la carga se adjunta al husillo de avance. Y para la configuración telescópica, la carga se adjunta al montaje del extremo en el tubo de extensión.
En cuanto a las configuraciones de husillo y tuerca giratorios, se espera que resistan únicamente las cargas axiales, por lo que se necesitará guía y apoyo en la forma de rodamientos lineales y rieles de guía para un funcionamiento apropiado. Como la guía y el apoyo están normalmente integrados a los actuadores telescópicos, la necesidad de rodamientos lineales y rieles de guía se puede suprimir en muchos casos.
Figura 5. Este ejemplo de aplicación de bomba de fluidos ilustra las configuraciones de montaje típico para los tres SMLA (de izquierda a derecha: husillo giratorio, tuerca giratoria, estilo telescópico).
Dimensionamiento para aplicaciones
Los altos niveles de personalización y configuración de los SMLA conducen a incontables posibilidades de aplicaciones. La figura 6 muestra algunos ejemplos comunes de aplicaciones de SMLA.
Figura 6. Al reducir el número total de componentes necesarios, los SMLA son ideales para una amplia variedad de aplicaciones con poco espacio, como las siguientes (de izquierda a derecha): etapa XY (husillos giratorios), posicionamiento horizontal (tuerca giratoria) y pipeteo de fluidos (estilo telescópico y husillo giratorio).
Dimensionar un SMLA para una aplicación específica, por lo tanto, implica entender las limitaciones del motor y el husillo y la tuerca de avance. Cada uno de estos componentes fundamentales se debe dimensionar correctamente para garantizar un funcionamiento apropiado y una óptima vida útil. Afortunadamente, la mayoría de los fabricantes ofrecen diagramas teóricos de rendimiento que consideran estos componentes, lo cual hace mucho más sencillo dimensionar un actuador rápidamente. Estos diagramas suelen tomar la forma de una curva de velocidad vs. carga y destacan el rango de rendimiento óptimo de la combinación motor, husillo y tuerca.
Comparación de SMLA
Los SMLA permiten abordar el enfoque de un diseño de sistema de movimiento modular que les permite a los ingenieros obtener una solución que se adapta en gran medida a los requisitos específicos de su aplicación. Determinar cuál de los tres SMLA es el mejor depende de muchos factores de la aplicación.
Aquellos que buscan la máxima personalización o una combinación exclusiva de componentes deberían considerar los actuadores de husillos giratorios. Los diseños de husillos giratorios son los tipos de SMLA más utilizados y, por esto, muchos ingenieros ya están familiarizados con ellos.
Las aplicaciones que se beneficiarían de un actuador más compacto y simple y que no necesitarían tuerca antijuego o muchas opciones de encoders podrían obtener mejores resultados de los diseños de tuerca giratoria. Los ingenieros que prefieren un diseño de actuador estilo vástago más tradicional y cuyas aplicaciones se beneficiarían de la guía, el apoyo y la antirrotación integrados, deberían considerar el diseño telescópico. Esta configuración también se debe considerar si es importante reducir la cantidad total de componentes, ya que los componentes de guía/apoyo integrados eliminan la necesidad de comprar piezas externas. La tabla 1 resume las fortalezas y debilidades de cada configuración de SMLA, y también incluye ejemplos de aplicaciones comunes.
Para ayudar a los diseñadores e integradores a recorrer la variedad de opciones, los fabricantes de SMLA están ofreciendo cada vez más herramientas en línea para ayudarlos a configurar soluciones rápida y fácilmente para sus aplicaciones. Por ejemplo, hay herramientas selectoras en línea que les permiten a los usuarios identificar el SMLA correcto para su aplicación en cuestión de minutos y, a su vez, pueden acceder a las características de rendimiento, modelos 3D, precios y tiempo de espera.
Utilizar herramientas selectoras automatizadas para entender el diseño, la mecánica, la instalación y el dimensionamiento de los tres tipos principales de SMLA puede ser útil para guiar a los diseñadores e integradores de movimiento a elegir la opción perfecta para sus aplicaciones.