

Quando progettisti e integratori hanno bisogno di un azionamento lineare semplice, flessibile e compatto, si rivolgono spesso agli attuatori lineari con motore passo-passo (SMLA). L'elevata configurabilità degli SMLA è tra le loro più grandi virtù, ma la scelta tra una miriade di opzioni di configurazione per trovare la soluzione ottimale per un'applicazione specifica può rappresentare una sfida anche per il tecnico di motion più esperto. Comprendere le funzionalità e i limiti specifici di ogni tipo di SMLA permetterà di sfruttarne al meglio l'elevata flessibilità.
Perché gli SMLA?
Molti fattori rendono gli SMLA desiderabili per l'azionamento lineare, il più evidente è sicuramente l'elevato livello di personalizzazione e configurabilità. L'efficienza nel design permette la configurazione di innumerevoli opzioni a livello di motore, madrevite e chiocciola per creare un gruppo unico per ogni applicazione.
Gli SMLA piacciono inoltre perché in questo modo il motore passo-passo beneficia di un livello base di controllo senza aver bisogno di dispositivi di retroazione quali encoder. Il progettista può programmare lo spostamento di un motore passo-passo in una determinata posizione con varie risoluzioni senza bisogno di retroazione a un dispositivo di azionamento o di controllo. In questo modo si abbattono i costi globali e la complessità rispetto a servomotori, motori CC brushless e di altro tipo.
Motori passo-passo e madreviti sono inoltre per loro natura compatibili, il che contribuisce a determinare l'elevata configurabilità dell'SMLA. Questa naturale compatibilità risulta evidente quando si tratta di intervalli di velocità ottimali, capacità di carico e precisione di posizionamento.
In aggiunta, madreviti e motori passo-passo offrono numerose opzioni di personalizzazione. Le madreviti ad esempio possono essere personalizzate per quanto riguarda lavorazione delle estremità, rivestimento, precisione, forma e lunghezza del filetto, mentre i motori passo-passo offrono possibilità di ottimizzazione degli avvolgimenti a livello di coppia e velocità, e di indicazione di cavi, connettori, encoder e lavorazione delle estremità in base all'applicazione specifica. L'integrazione di motori passo-passo con madreviti aumenta drasticamente il numero di opzioni disponibili.
Tipi di SMLA
Sebbene il numero di possibili combinazioni sia elevato, gli SMLA sono generalmente disponibili in tre versioni diverse: vite rotante, chiocciola rotante e telescopica. (Figura 1)
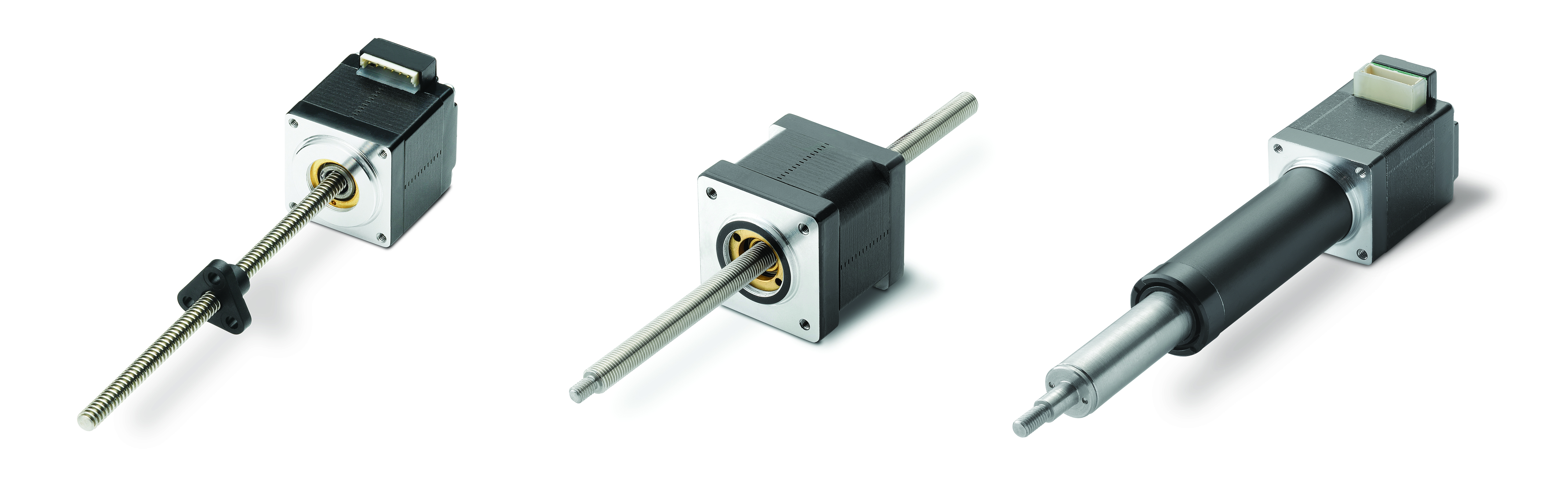
Figura 1. I tre tipi di SMLA (da sinistra a destra: vite rotante, chiocciola rotante e telescopico) sono caratterizzati da una meccanica unica che li rende ideali per diverse applicazioni.
Ciascuna delle versioni di SMLA è costituita dagli stessi componenti: un motore passo-passo (1), una madrevite (2) e una chiocciola (3) ma, come mostrato nelle Figure 2-4, il nucleo meccanico è diverso in funzione del ruolo della chiocciola.
Struttura e componenti meccanici della versione con vite rotante
La configurazione con vite rotante, nota anche come madrevite motorizzata, chiocciola lineare esterna o esterna o chiocciola traslante, garantisce la massima flessibilità e personalizzazione a livello di progettazione. Come suggerisce il nome, l'azionamento avviene quando la madrevite ruota. Una volta adeguatamente bloccata per evitarne la rotazione insieme alla madrevite, la chiocciola trasla attraverso il filetto della madrevite.
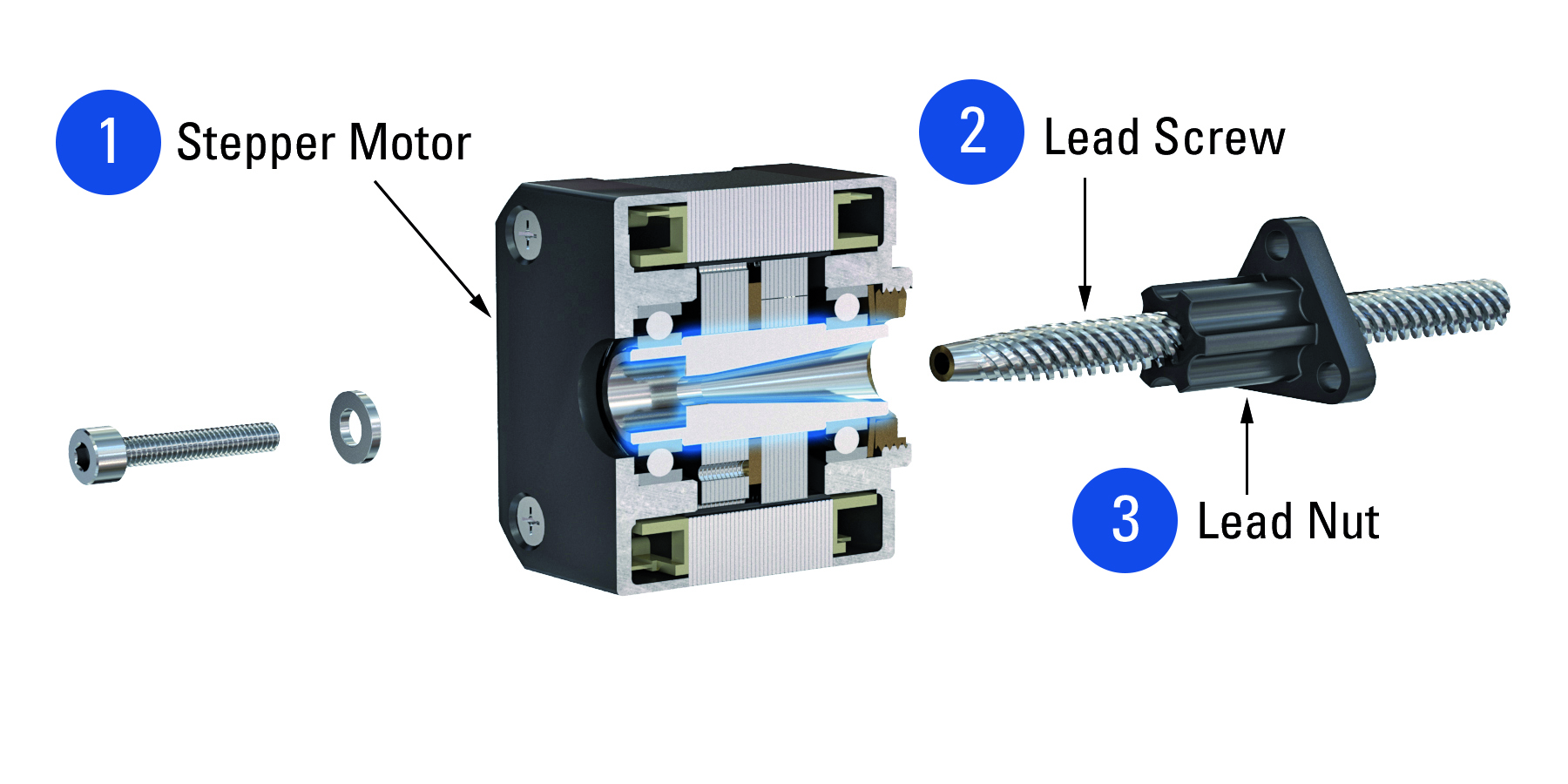
Figura 2. Dettaglio di una configurazione con vite rotante.
Struttura e componenti meccanici della versione con chiocciola rotante
Il gruppo con chiocciola rotante vanta il design più compatto delle tre configurazioni. Questo design garantisce una lunghezza minima sia complessiva che retratta e non vi è praticamente alcuna rotazione visibile dei componenti. Questa versione dell'attuatore è anche detta chioccola motorizzata, chiocciola interna non prigioniera e vite traslante.
La meccanica di un SMLA a chiocciola rotante è sostanzialmente l'opposto della configurazione con vite rotante. Durante l'azionamento del motore, la chiocciola integrata all'interno dell'albero ruota e induce la madrevite fissata a un carico a traslare dentro e fuori dal motore.
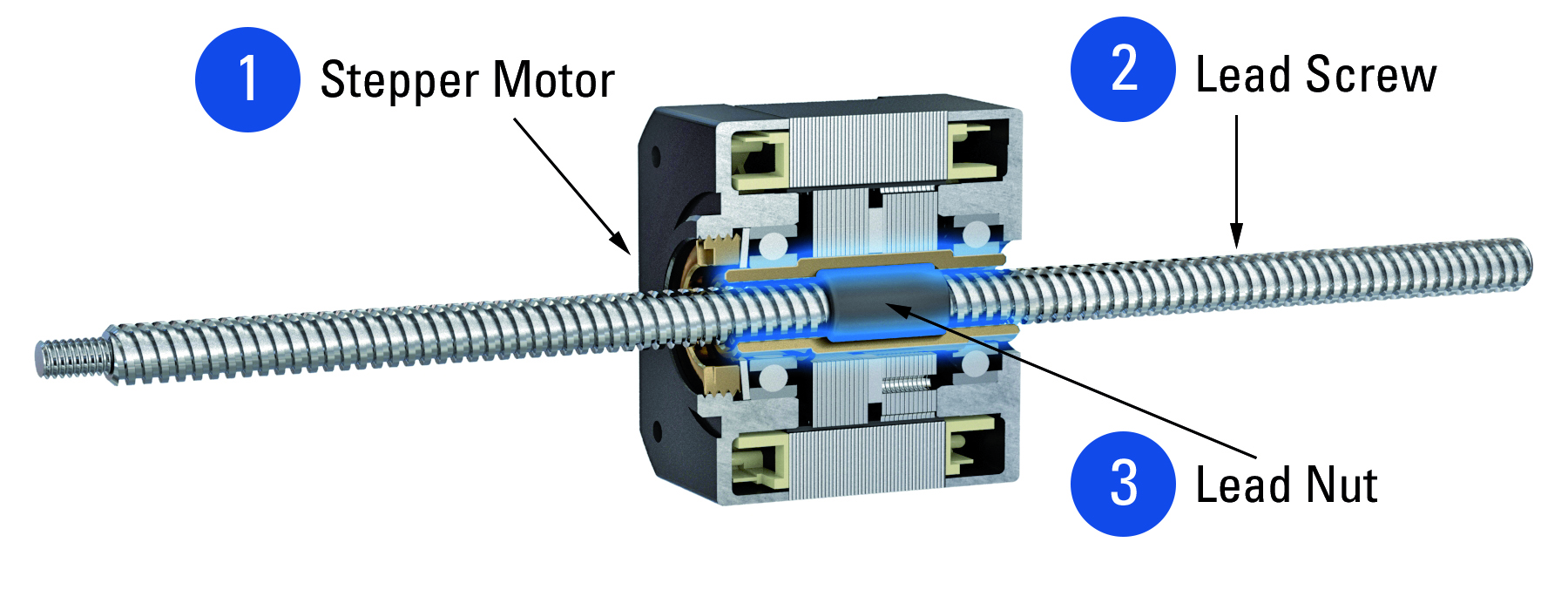
Figura 3. Dettaglio di una configurazione con chioccola rotante.
Struttura e meccanica della versione telescopica
Gli attuatori telescopici funzionano più come i tradizionali attuatori a stelo presenti nella maggior parte delle applicazioni industriali, pur avendo comunque i vantaggi di un'unità configurabile basata su motore passo-passo e madrevite. Il nucleo dell'attuatore telescopico è costituito da una configurazione con vite rotante e componenti esterni all'alloggiamento che "catturano" la madrevite all'interno di una scanalatura e utilizzano una boccola interna per garantire un certo supporto al carico laterale e di momento. Poiché queste configurazioni integrano direttamente guida e supporto, in molti casi non occorrono i componenti esterni che sarebbero altrimenti necessari. Questo tipo di attuatori è anche detto attuatore con madrevite motorizzata, stelo elettrico prigioniero e cilindro elettrico.
La meccanica di un SMLA telescopico è simile a quella della versione con vite rotante. La differenza primaria è che la sua configurazione integra componenti di guida e supporto sotto forma di un tubo con rivestimento scanalato e di un tubo di prolunga con una bussola di supporto, che permette il movimento senza la necessità di componenti esterni.
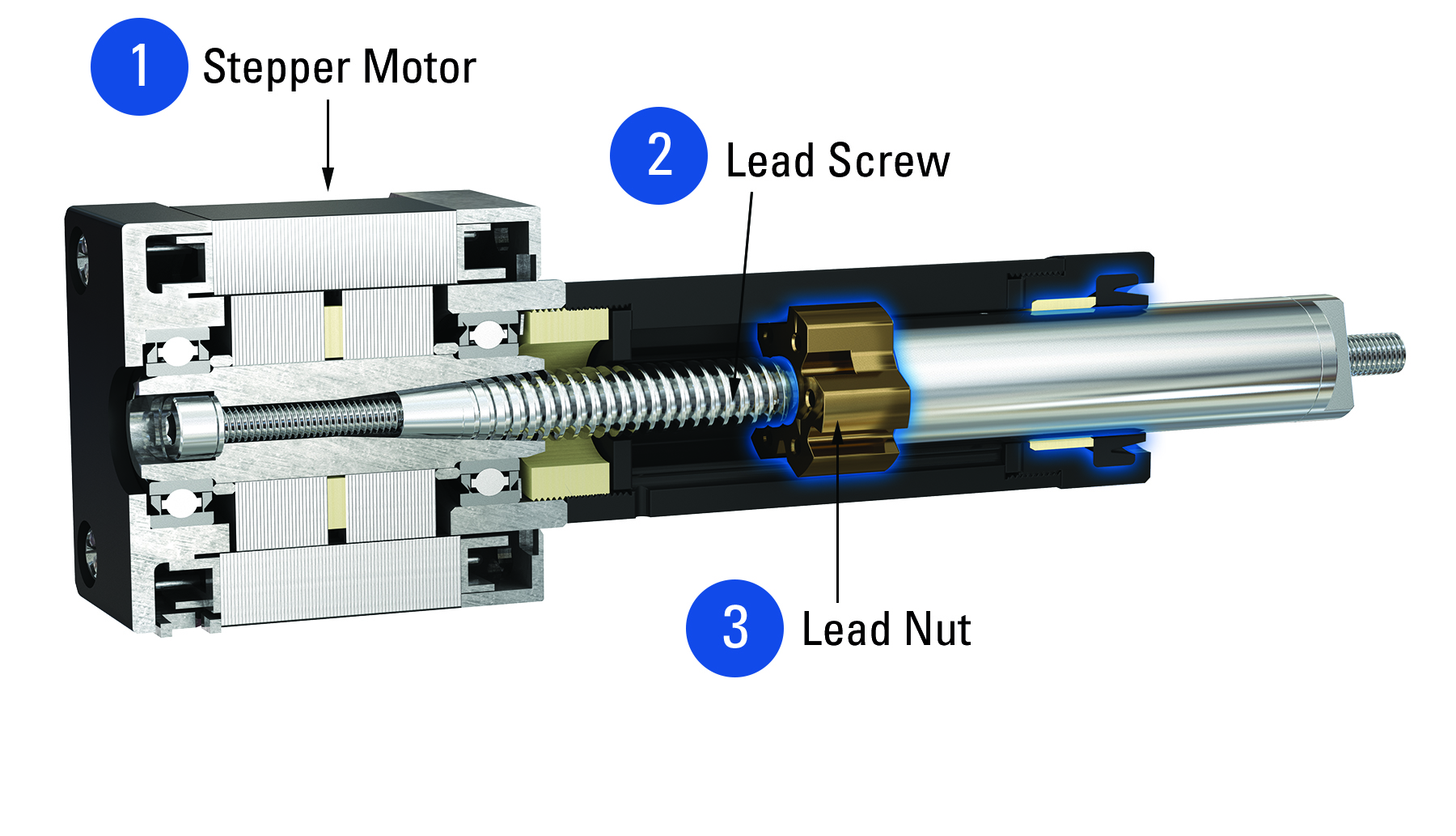
Figura 4. Dettaglio di una configurazione telescopica.
Installazione
Tutte e tre le configurazioni di SMLA hanno un processo di installazione simile, che consiste principalmente nelle fasi di montaggio del motore, eventuale supporto della madrevite e fissaggio del carico. Le differenze principali risiedono nel punto di fissaggio del carico e nella modalità di supporto dello stesso. (Figura 5) Nelle configurazioni con vite rotante il carico viene fissato alla chiocciola e l'estremità della madrevite dovrà essere supporta con un cuscinetto o una boccola per lunghezze maggiori.
Nelle configurazioni con chioccola rotante il carico viene fissato alla madrevite. E nelle configurazioni telescopiche il carico verrà fissato all'estremità del tubo di prolunga.
Sia la configurazione con vite rotante che quella con chiocciola rotante sono destinate a tollerare solo carichi assiali, quindi per un corretto funzionamento sarà necessario un supporto sotto forma di cuscinetti e guide lineari. Dal momento che guida e supporto sono di regola integrati negli attuatori telescopici, in molte situazioni è possibile eliminare la necessità di cuscinetti e guide lineari.
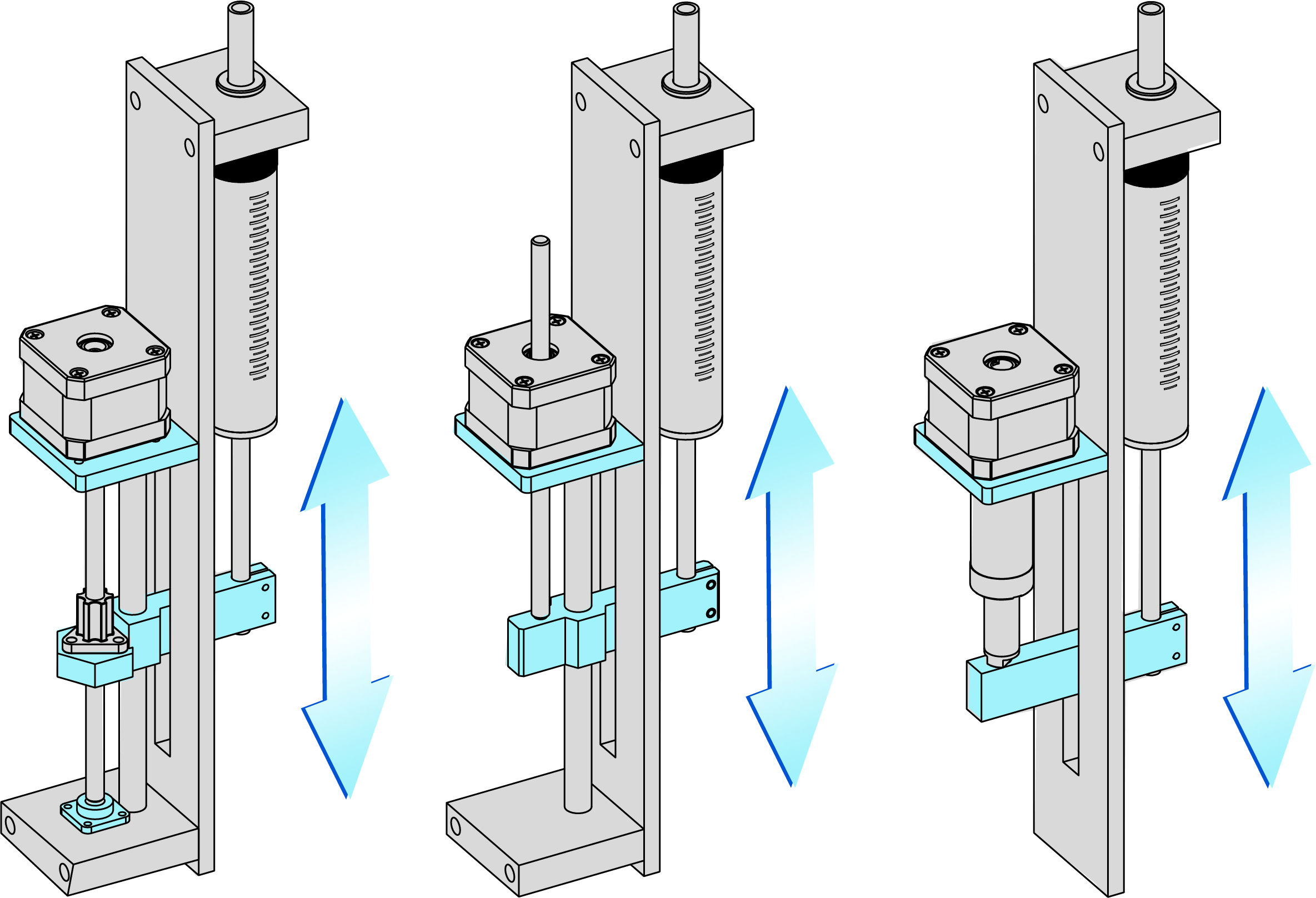
Figura 5. Questo esempi di applicazione con pompa per fluido illustra le tipiche configurazioni di montaggio per tutte e tre le tipologie di SMLA (da sinistra a destra: vite rotante, chiocciola rotante e telescopica).
Dimensionamento per le varie applicazioni
Gli elevati livelli di personalizzazione e configurabilità degli SMLA li rendono adatti a numerosissime applicazioni. La Figura 6 mostra alcuni comuni esempi di applicazioni per SMLA.
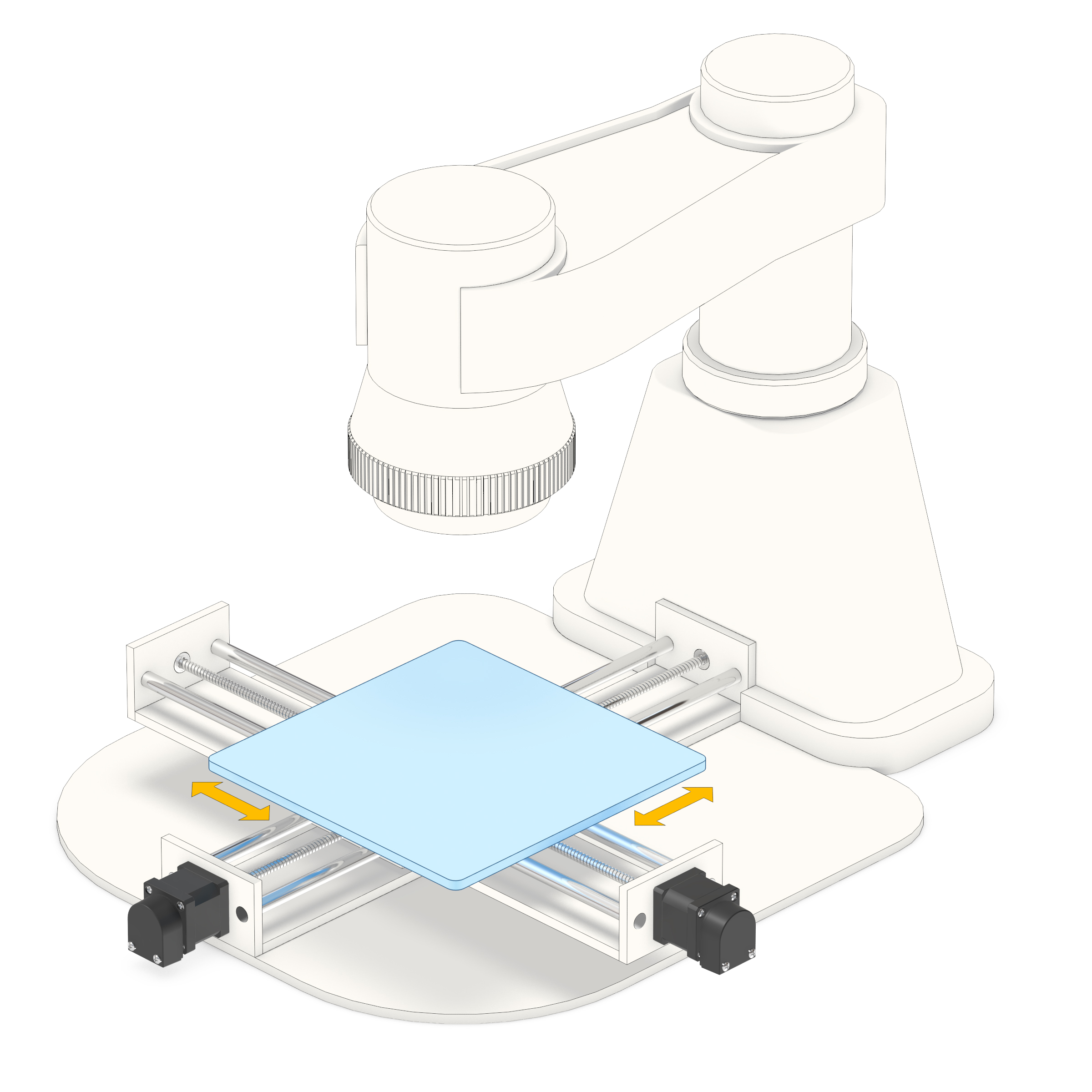
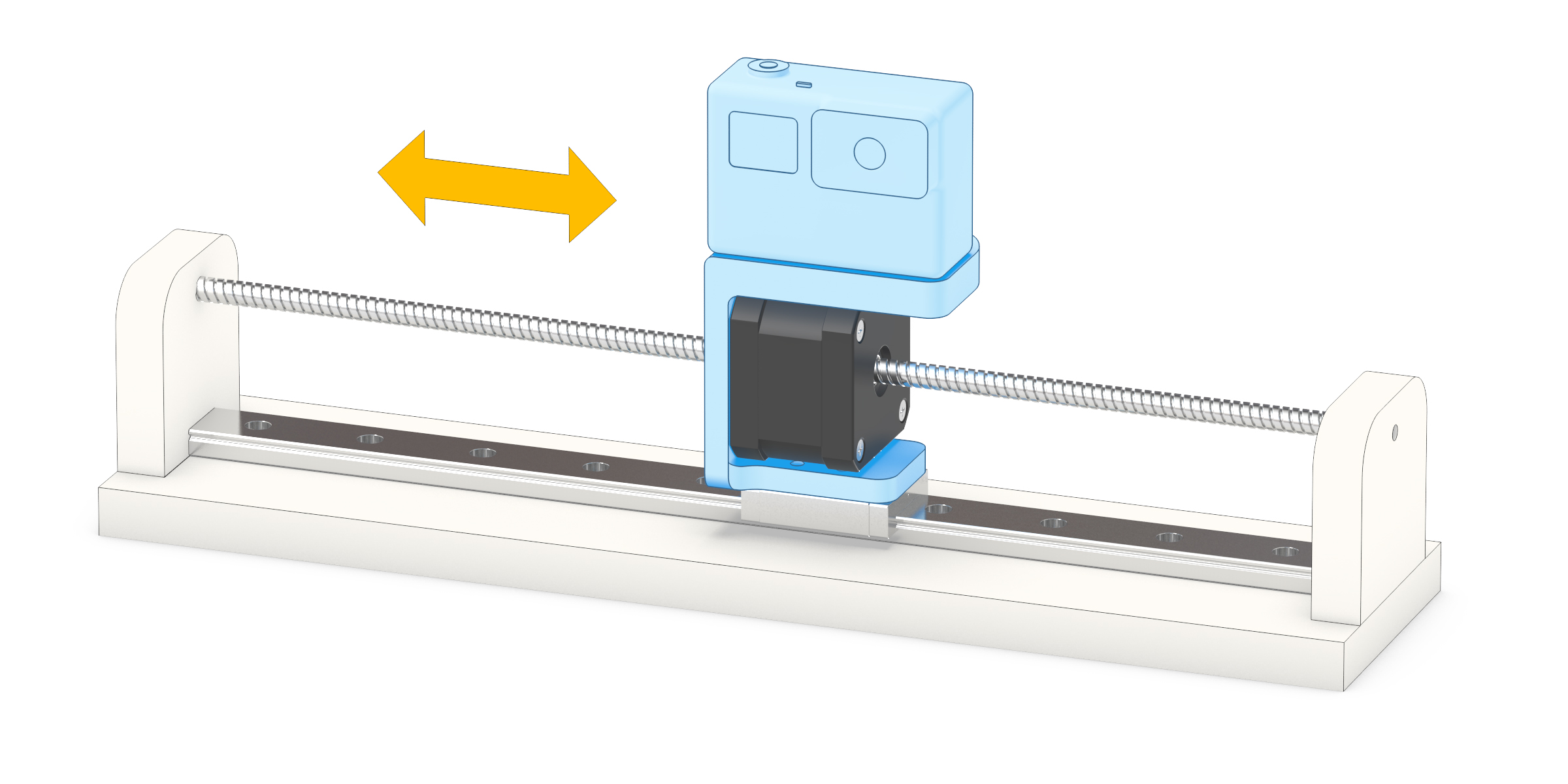
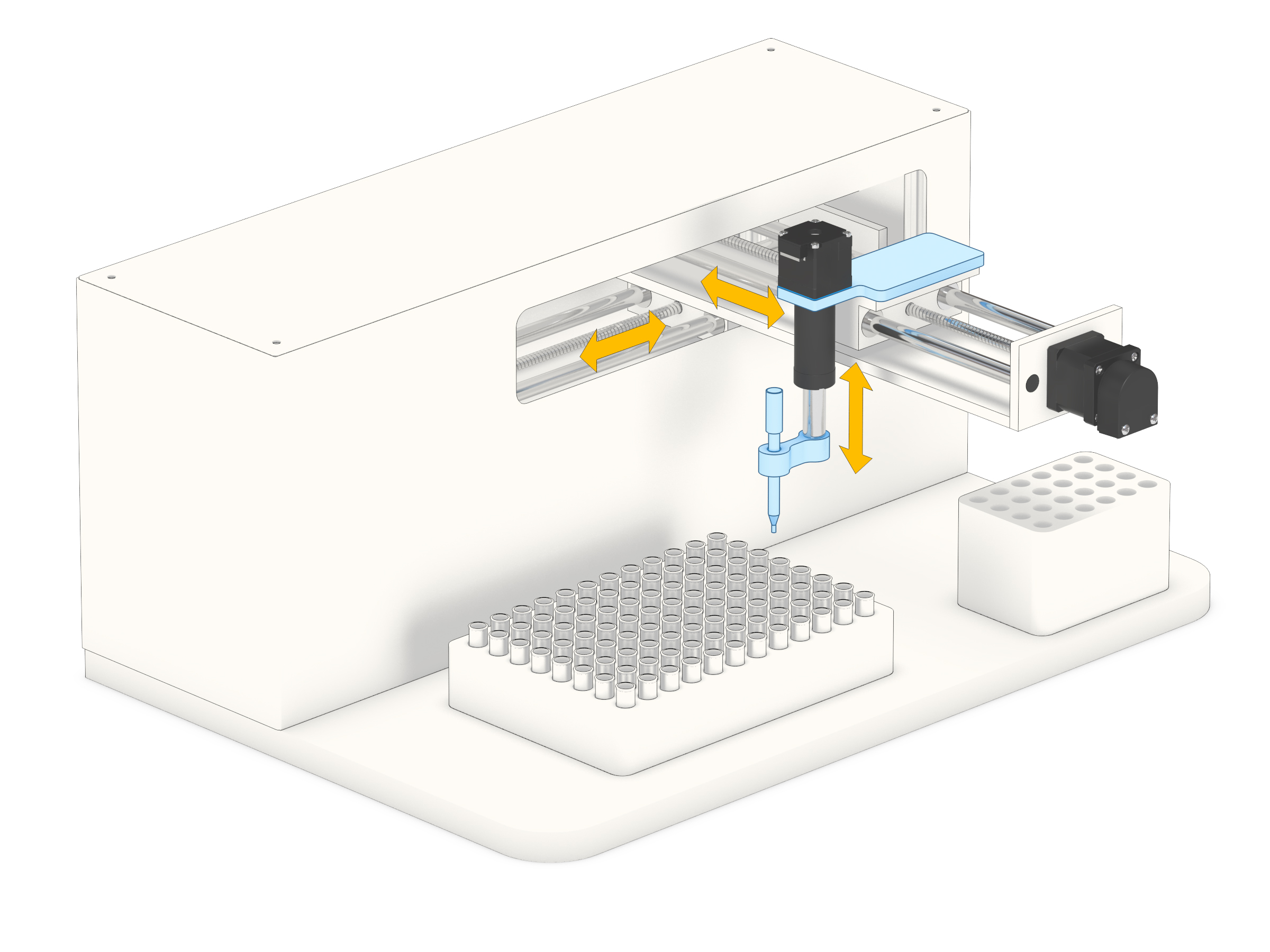
Figura 6. Riducendo il numero complessivo dei componenti necessari, gli SMLA sono ideali per un'ampia gamma di applicazioni con ingombro ridotto, incluse (da sinistra a destra): stadio XY (viti rotanti), posizionamento orizzontale (chiocciola rotante) e pipettatura di fluidi (versione telescopica e con vite rotante).
Il dimensionamento di un SMLA per un'applicazione implica quindi la conoscenza dei limiti correlati al motore, alla madrevite e alla chiocciola. Ciascuno di questi componenti chiave deve essere adeguatamente dimensionato per garantire il coretto funzionamento e una durata ottimale. Fortunatamente, la maggior parte dei produttori prepara diagrammi prestazionali teorici che tengono conto di questi componenti, facilitando molto il dimensionamento rapido di un attuatore. Questi diagrammi sono di norma curve velocità-carico, che evidenziano l'intervallo di prestazione ottimale della combinazione di motore, vite e chiocciola.
Gli SMLA a confronto
Gli SMLA si caratterizzano per un approccio di progettazione modulare dei sistemi di motion, che permette ai tecnici di implementare una soluzione su misura per gli specifici requisiti di un'applicazione. Determinare quale dei tre SMLA è il migliore dipende da vari fattori legati all'applicazione.
Chi cerca il massimo della personalizzazione o una combinazione assolutamente unica di componenti dovrebbe prendere in esame gli attuatori con vite rotante. I sistemi con vite rotante sono gli SMLA più diffusi e molti tecnici sicuramente li conoscono già.
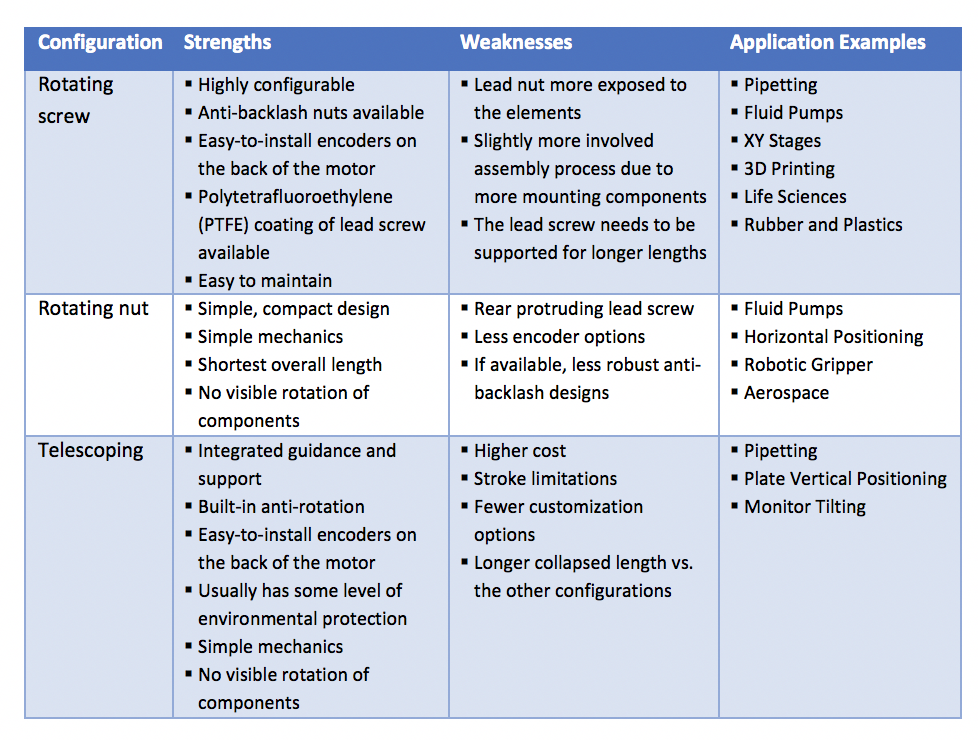
Le applicazioni che trarrebbero vantaggio da un attuatore più semplice e compatto e che non necessitano di una chiocciola senza gioco o di molte opzioni encoder, potrebbero trovare la soluzione ottimale nelle tipologie con chiocciola rotante. I tecnici che preferiscono un attuatore a stelo più tradizionale e le cui applicazioni trarrebbero vantaggio da guida, supporto e sistema anti-rotazione integrati, dovrebbero prendere in esame il design telescopico. Questa configurazione merita inoltre di essere presa in esame se è importante ridurre il numero totale di componenti dal momento che i sistemi di guida/supporto integrati eliminano la necessità di acquistare componenti esterni. La Tabella 1 sintetizza i pro e i contro più comuni di ciascuna configurazione SMLA e riporta inoltre alcuni esempi di applicazione.
Per aiutare i progettisti e gli integratori a districarsi tra le varie opzioni, i produttori di SMLA stanno offrendo sempre più spesso strumenti online per una configurazione rapida e semplice di soluzioni adatte alle varie applicazioni. Ad esempio sono disponibili strumenti di selezione online che permettono agli utenti di individuare l'SMLA giusto per un'applicazione in pochi minuti, accedendo immediatamente alle relative caratteristiche, ai modelli 3D, ai listini prezzi e ai tempi di consegna.
L'applicazione di strumenti di seleziona automatica per comprendere design, meccanica, installazione e dimensionamento dei tre tipi principali di SMLA può guidare progettisti e integratori di soluzioni di motion nella scelta ottimale per le rispettive applicazioni.
Quando progettisti e integratori hanno bisogno di un azionamento lineare semplice, flessibile e compatto, si rivolgono spesso agli attuatori lineari con motore passo-passo (SMLA). L'elevata configurabilità degli SMLA è tra le loro più grandi virtù, ma la scelta tra una miriade di opzioni di configurazione per trovare la soluzione ottimale per un'applicazione specifica può rappresentare una sfida anche per il tecnico di motion più esperto. Comprendere le funzionalità e i limiti specifici di ogni tipo di SMLA permetterà di sfruttarne al meglio l'elevata flessibilità.
Perché gli SMLA?
Molti fattori rendono gli SMLA desiderabili per l'azionamento lineare, il più evidente è sicuramente l'elevato livello di personalizzazione e configurabilità. L'efficienza nel design permette la configurazione di innumerevoli opzioni a livello di motore, madrevite e chiocciola per creare un gruppo unico per ogni applicazione.
Gli SMLA piacciono inoltre perché in questo modo il motore passo-passo beneficia di un livello base di controllo senza aver bisogno di dispositivi di retroazione quali encoder. Il progettista può programmare lo spostamento di un motore passo-passo in una determinata posizione con varie risoluzioni senza bisogno di retroazione a un dispositivo di azionamento o di controllo. In questo modo si abbattono i costi globali e la complessità rispetto a servomotori, motori CC brushless e di altro tipo.
Motori passo-passo e madreviti sono inoltre per loro natura compatibili, il che contribuisce a determinare l'elevata configurabilità dell'SMLA. Questa naturale compatibilità risulta evidente quando si tratta di intervalli di velocità ottimali, capacità di carico e precisione di posizionamento.
In aggiunta, madreviti e motori passo-passo offrono numerose opzioni di personalizzazione. Le madreviti ad esempio possono essere personalizzate per quanto riguarda lavorazione delle estremità, rivestimento, precisione, forma e lunghezza del filetto, mentre i motori passo-passo offrono possibilità di ottimizzazione degli avvolgimenti a livello di coppia e velocità, e di indicazione di cavi, connettori, encoder e lavorazione delle estremità in base all'applicazione specifica. L'integrazione di motori passo-passo con madreviti aumenta drasticamente il numero di opzioni disponibili.
Tipi di SMLA
Sebbene il numero di possibili combinazioni sia elevato, gli SMLA sono generalmente disponibili in tre versioni diverse: vite rotante, chiocciola rotante e telescopica. (Figura 1)
Figura 1. I tre tipi di SMLA (da sinistra a destra: vite rotante, chiocciola rotante e telescopico) sono caratterizzati da una meccanica unica che li rende ideali per diverse applicazioni.
Ciascuna delle versioni di SMLA è costituita dagli stessi componenti: un motore passo-passo (1), una madrevite (2) e una chiocciola (3) ma, come mostrato nelle Figure 2-4, il nucleo meccanico è diverso in funzione del ruolo della chiocciola.
Struttura e componenti meccanici della versione con vite rotante
La configurazione con vite rotante, nota anche come madrevite motorizzata, chiocciola lineare esterna o esterna o chiocciola traslante, garantisce la massima flessibilità e personalizzazione a livello di progettazione. Come suggerisce il nome, l'azionamento avviene quando la madrevite ruota. Una volta adeguatamente bloccata per evitarne la rotazione insieme alla madrevite, la chiocciola trasla attraverso il filetto della madrevite.
Figura 2. Dettaglio di una configurazione con vite rotante.
Struttura e componenti meccanici della versione con chiocciola rotante
Il gruppo con chiocciola rotante vanta il design più compatto delle tre configurazioni. Questo design garantisce una lunghezza minima sia complessiva che retratta e non vi è praticamente alcuna rotazione visibile dei componenti. Questa versione dell'attuatore è anche detta chioccola motorizzata, chiocciola interna non prigioniera e vite traslante.
La meccanica di un SMLA a chiocciola rotante è sostanzialmente l'opposto della configurazione con vite rotante. Durante l'azionamento del motore, la chiocciola integrata all'interno dell'albero ruota e induce la madrevite fissata a un carico a traslare dentro e fuori dal motore.
Figura 3. Dettaglio di una configurazione con chioccola rotante.
Struttura e meccanica della versione telescopica
Gli attuatori telescopici funzionano più come i tradizionali attuatori a stelo presenti nella maggior parte delle applicazioni industriali, pur avendo comunque i vantaggi di un'unità configurabile basata su motore passo-passo e madrevite. Il nucleo dell'attuatore telescopico è costituito da una configurazione con vite rotante e componenti esterni all'alloggiamento che "catturano" la madrevite all'interno di una scanalatura e utilizzano una boccola interna per garantire un certo supporto al carico laterale e di momento. Poiché queste configurazioni integrano direttamente guida e supporto, in molti casi non occorrono i componenti esterni che sarebbero altrimenti necessari. Questo tipo di attuatori è anche detto attuatore con madrevite motorizzata, stelo elettrico prigioniero e cilindro elettrico.
La meccanica di un SMLA telescopico è simile a quella della versione con vite rotante. La differenza primaria è che la sua configurazione integra componenti di guida e supporto sotto forma di un tubo con rivestimento scanalato e di un tubo di prolunga con una bussola di supporto, che permette il movimento senza la necessità di componenti esterni.
Figura 4. Dettaglio di una configurazione telescopica.
Installazione
Tutte e tre le configurazioni di SMLA hanno un processo di installazione simile, che consiste principalmente nelle fasi di montaggio del motore, eventuale supporto della madrevite e fissaggio del carico. Le differenze principali risiedono nel punto di fissaggio del carico e nella modalità di supporto dello stesso. (Figura 5) Nelle configurazioni con vite rotante il carico viene fissato alla chiocciola e l'estremità della madrevite dovrà essere supporta con un cuscinetto o una boccola per lunghezze maggiori.
Nelle configurazioni con chioccola rotante il carico viene fissato alla madrevite. E nelle configurazioni telescopiche il carico verrà fissato all'estremità del tubo di prolunga.
Sia la configurazione con vite rotante che quella con chiocciola rotante sono destinate a tollerare solo carichi assiali, quindi per un corretto funzionamento sarà necessario un supporto sotto forma di cuscinetti e guide lineari. Dal momento che guida e supporto sono di regola integrati negli attuatori telescopici, in molte situazioni è possibile eliminare la necessità di cuscinetti e guide lineari.
Figura 5. Questo esempi di applicazione con pompa per fluido illustra le tipiche configurazioni di montaggio per tutte e tre le tipologie di SMLA (da sinistra a destra: vite rotante, chiocciola rotante e telescopica).
Dimensionamento per le varie applicazioni
Gli elevati livelli di personalizzazione e configurabilità degli SMLA li rendono adatti a numerosissime applicazioni. La Figura 6 mostra alcuni comuni esempi di applicazioni per SMLA.
Figura 6. Riducendo il numero complessivo dei componenti necessari, gli SMLA sono ideali per un'ampia gamma di applicazioni con ingombro ridotto, incluse (da sinistra a destra): stadio XY (viti rotanti), posizionamento orizzontale (chiocciola rotante) e pipettatura di fluidi (versione telescopica e con vite rotante).
Il dimensionamento di un SMLA per un'applicazione implica quindi la conoscenza dei limiti correlati al motore, alla madrevite e alla chiocciola. Ciascuno di questi componenti chiave deve essere adeguatamente dimensionato per garantire il coretto funzionamento e una durata ottimale. Fortunatamente, la maggior parte dei produttori prepara diagrammi prestazionali teorici che tengono conto di questi componenti, facilitando molto il dimensionamento rapido di un attuatore. Questi diagrammi sono di norma curve velocità-carico, che evidenziano l'intervallo di prestazione ottimale della combinazione di motore, vite e chiocciola.
Gli SMLA a confronto
Gli SMLA si caratterizzano per un approccio di progettazione modulare dei sistemi di motion, che permette ai tecnici di implementare una soluzione su misura per gli specifici requisiti di un'applicazione. Determinare quale dei tre SMLA è il migliore dipende da vari fattori legati all'applicazione.
Chi cerca il massimo della personalizzazione o una combinazione assolutamente unica di componenti dovrebbe prendere in esame gli attuatori con vite rotante. I sistemi con vite rotante sono gli SMLA più diffusi e molti tecnici sicuramente li conoscono già.
Le applicazioni che trarrebbero vantaggio da un attuatore più semplice e compatto e che non necessitano di una chiocciola senza gioco o di molte opzioni encoder, potrebbero trovare la soluzione ottimale nelle tipologie con chiocciola rotante. I tecnici che preferiscono un attuatore a stelo più tradizionale e le cui applicazioni trarrebbero vantaggio da guida, supporto e sistema anti-rotazione integrati, dovrebbero prendere in esame il design telescopico. Questa configurazione merita inoltre di essere presa in esame se è importante ridurre il numero totale di componenti dal momento che i sistemi di guida/supporto integrati eliminano la necessità di acquistare componenti esterni. La Tabella 1 sintetizza i pro e i contro più comuni di ciascuna configurazione SMLA e riporta inoltre alcuni esempi di applicazione.
Per aiutare i progettisti e gli integratori a districarsi tra le varie opzioni, i produttori di SMLA stanno offrendo sempre più spesso strumenti online per una configurazione rapida e semplice di soluzioni adatte alle varie applicazioni. Ad esempio sono disponibili strumenti di selezione online che permettono agli utenti di individuare l'SMLA giusto per un'applicazione in pochi minuti, accedendo immediatamente alle relative caratteristiche, ai modelli 3D, ai listini prezzi e ai tempi di consegna.
L'applicazione di strumenti di seleziona automatica per comprendere design, meccanica, installazione e dimensionamento dei tre tipi principali di SMLA può guidare progettisti e integratori di soluzioni di motion nella scelta ottimale per le rispettive applicazioni.