

Gdy projektanci i integratorzy potrzebują prostego, elastycznego i kompaktowego rozwiązania w zakresie napędzania liniowego, często sięgają po siłowniki liniowe z silnikiem krokowym (SMLA). Duża konfigurowalność siłowników SMLA jest jedną z ich największych zalet, ale przebrnięcie przez niezliczone opcje konfiguracji w celu dobrania optymalnego rozwiązania do konkretnego zastosowania może stanowić wyzwanie nawet dla najbardziej doświadczonego inżyniera ruchu. Zrozumienie wyjątkowych możliwości i ograniczeń poszczególnych rodzajów siłownika SMLA ułatwi maksymalne wykorzystanie ich dużej elastyczności.
Dlaczego warto wybrać siłowniki SMLA?
Wiele czynników sprawia, że siłowniki SMLA są chętnie wykorzystywane w rozwiązaniach napędu liniowego. Najważniejszymi z nich są duże możliwości w zakresie dostosowania i konfigurowalność. Ich przemyślana konstrukcja umożliwia konfigurację niezliczonych opcji silnika, śruby pociągowej i nakrętki pociągowej w celu opracowania unikalnego zespołu do danego zastosowania.
Siłowniki SMLA są popularne również dlatego, że silnik krokowy zapewnia podstawowy poziom sterowania bez konieczności stosowania zewnętrznych urządzeń sprzężenia zwrotnego, takich jak enkodery. Projektant może zaprogramować silnik krokowy tak, aby poruszał się do dokładnie określonego położenia przy różnych rozdzielczościach, bez konieczności przekazywania informacji zwrotnej do sterownika lub kontrolera. Dzięki temu całościowy koszt i złożoność mogą być niższe niż w przypadku serwonapędów, bezszczotkowych silników prądu stałego i innych opcji.
Silniki krokowe i śruby pociągowe są również z natury kompatybilne, co przyczynia się do wysokiej konfigurowalności SMLA. To naturalne dopasowanie jest wyraźnie widoczne w kontekście optymalnych zakresów prędkości, obciążalności i dokładności pozycjonowania.
Ponadto śruby pociągowe i silniki krokowe mogą być na wiele sposobów dostosowywane do potrzeb klienta. Śruby pociągowe można na przykład dostosować pod względem obróbki końcowej, powłoki, dokładności, kształtu i długości gwintu, natomiast w odniesieniu do silników krokowych dostępne są opcje optymalizacji uzwojenia silnika pod kątem momentu obrotowego i prędkości, a także możliwe jest dobranie okablowania, złączy, enkoderów i obróbki końcowej do danego zastosowania. Integracja silników krokowych ze śrubami pociągowymi znacząco zwiększa liczbę możliwych projektów.
Rodzaje siłowników SMLA
Chociaż liczba możliwych kombinacji jest duża, siłowniki SMLA są zwykle dostępne w trzech różnych wersjach: obracająca się śruba, obracająca się nakrętka oraz wersja teleskopowa. (rysunek 1).
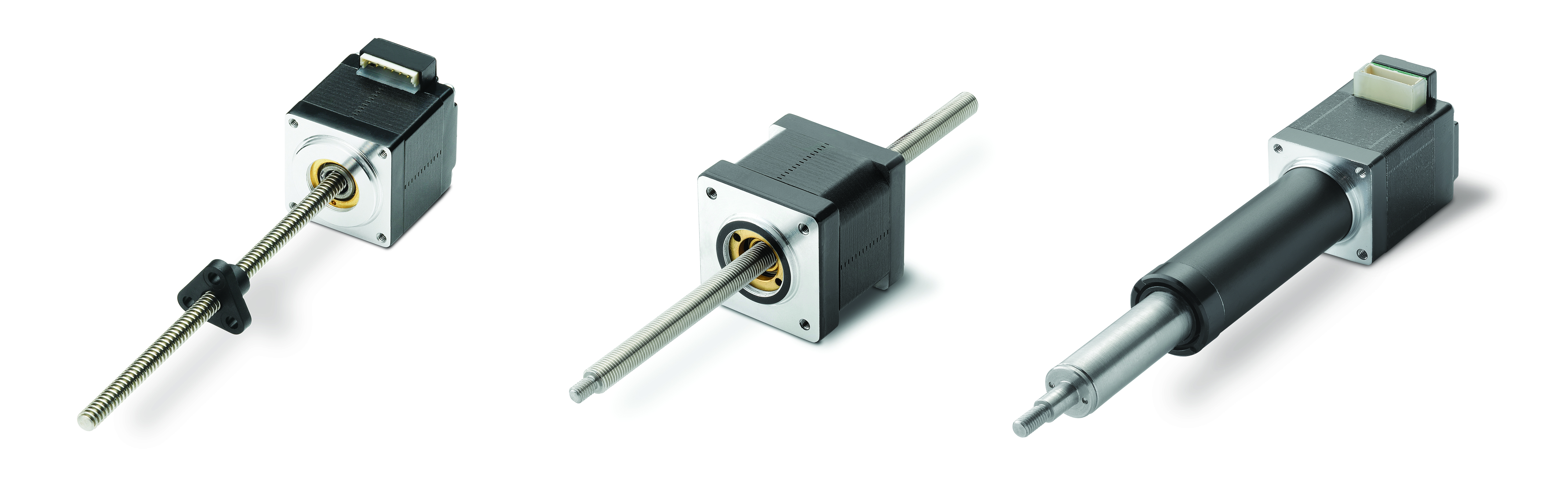
Rysunek 1. Trzy rodzaje siłowników SMLA (od lewej do prawej: obracająca się śruba, obracająca się nakrętka oraz wersja teleskopowa) charakteryzują się unikalną mechaniką, która czyni je idealnymi do różnych zastosowań.
Siłowniki SMLA każdego rodzaju składają się z tych samych elementów ogólnych: silnika krokowego (1), śruby pociągowej (2) i nakrętki pociągowej (3), ale jak pokazano na rysunkach 2–4, podstawowa mechanika różni się w zależności od roli nakrętki.
Konstrukcja i mechanika obracającej się śruby
Konfiguracja obracającej się śruby, która jest również znana jako napędzana śruba pociągowa, śruba zewnętrzna liniowa, zewnętrzna nakrętka lub nakrętka przenosząca, zapewnia największą elastyczność w zakresie projektowania i możliwość dostosowania do potrzeb klienta. Jak sama nazwa wskazuje, napędzanie następuje, gdy śruba pociągowa obraca się. Po odpowiednim unieruchomieniu, aby uniemożliwić jej obracanie się wraz ze śrubą pociągową, nakrętka pociągowa będzie się przesuwać wzdłuż gwintu śruby pociągowej.
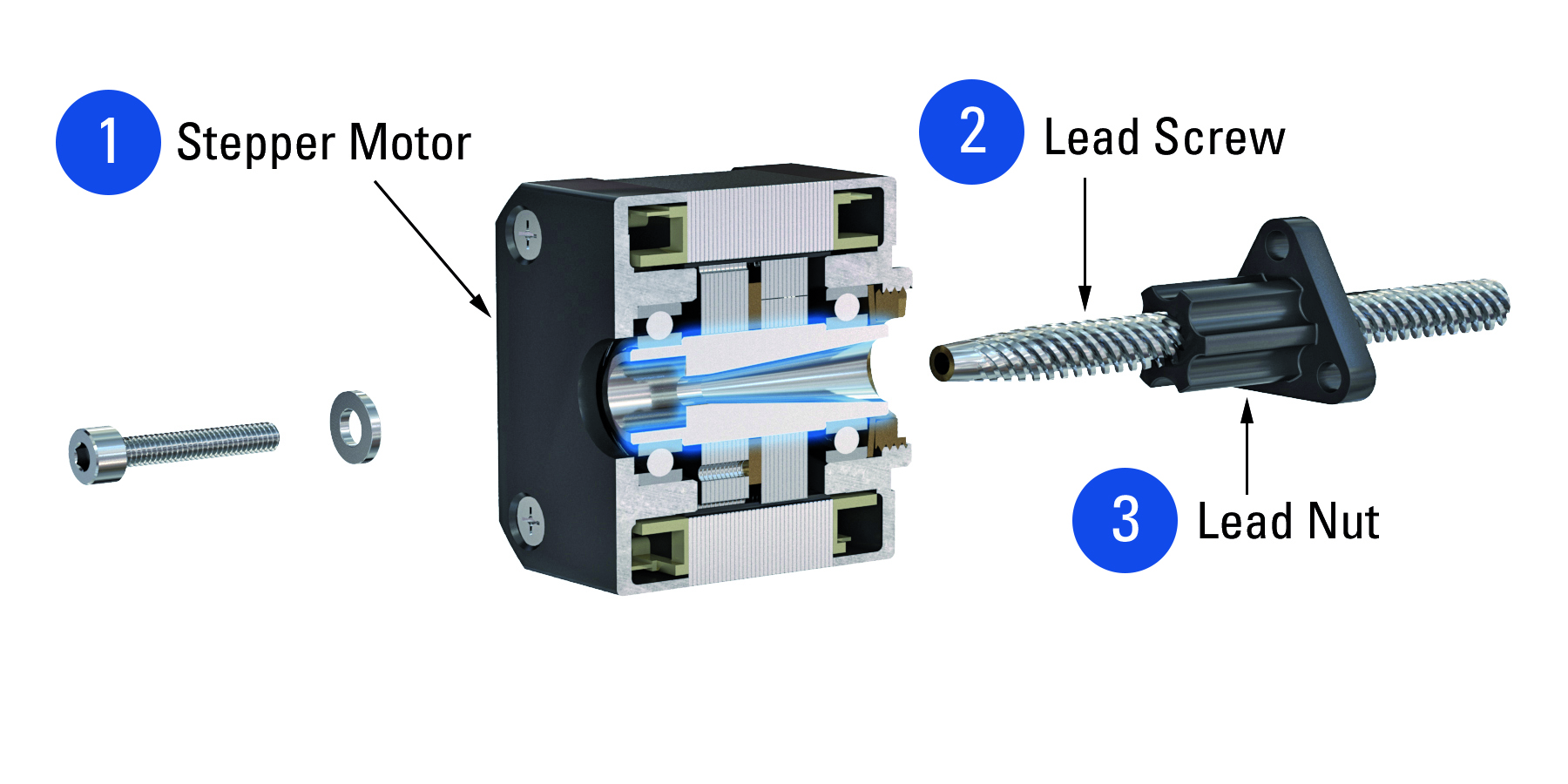
Rysunek 2. Widok przekroju konfiguracji z obracającą się śrubą.
Konstrukcja i mechanika obracającej się nakrętki
Zespół obracającej się nakrętki ma najmniejszą i najbardziej zwartą konstrukcję spośród trzech konfiguracji. Taka konstrukcja pozwala na uzyskanie najkrótszej długości po wsunięciu i długości całkowitej, a jednocześnie praktycznie nie widać obrotu żadnego z elementów zespołu. Inne nazwy tego typu siłowników to: napędzana nakrętka pociągowa, nakrętka bez blokady obrotów, nakrętka wewnętrzna i śruba przenosząca.
Mechanika siłownika SMLA z obracającą się nakrętką jest w zasadzie odwrotnością konfiguracji z obracającą się śrubą. Gdy silnik jest napędzany, zintegrowana nakrętka pociągowa na wale silnika obraca się i wymusza ruch śruby pociągowej przymocowanej do obciążenia w kierunku do i z silnika.
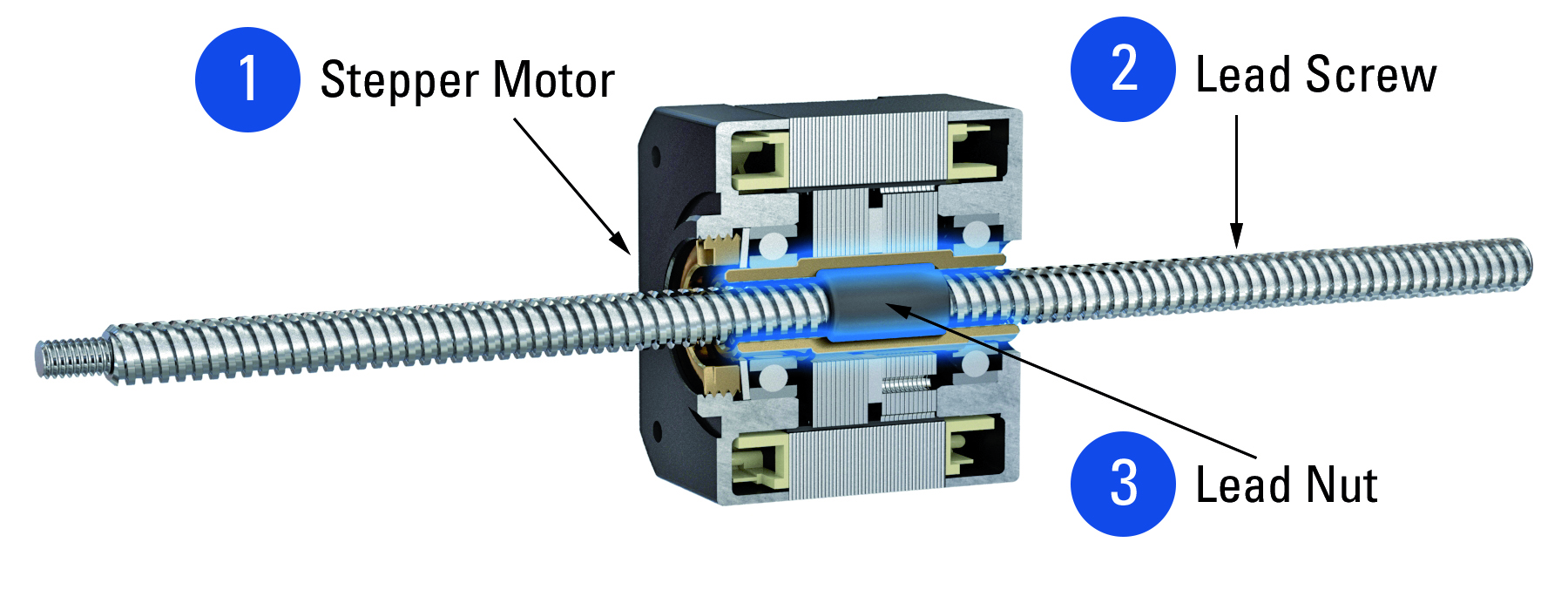
Rysunek 3. Widok przekroju konfiguracji z obracającą się nakrętką.
Konstrukcja i mechanika wersji teleskopowej
Siłowniki typu teleskopowego są przeznaczone do pracy w sposób zbliżony do tradycyjnych siłowników prętowych stosowanych w większości zastosowań przemysłowych, a jednocześnie mają zalety konfigurowalnego silnika krokowego i zespołu wykorzystującego obracającą się śrubę. Zasadniczo siłownik teleskopowy stanowi konfigurację obracającej się śruby z dodatkowymi elementami w obudowie, które „chwytają” nakrętkę pociągową w wypust i wykorzystują tuleję wewnętrzną do zapewnienia podparcia dla obciążenia bocznego i chwilowego. Ponieważ te konfiguracje uwzględniają prowadzenie i podparcie bezpośrednio w swojej konstrukcji, w wielu przypadkach nie będą potrzebne zewnętrzne komponenty, które w innym przypadku mogłyby być wymagane. Tego typu siłownik nazywany jest też siłownikiem z napędzaną śrubą pociągową, siłownikiem z blokadą, siłownikiem elektrycznym prętowym i siłownikiem elektrycznym.
Mechanika teleskopowego siłownika SMLA jest podobna do mechaniki konfiguracji z obracającą się śrubą. Główna różnica polega na tym, że w jego konfiguracji zintegrowano elementy prowadzące i podpierające w postaci wypustowej rury osłonowej i rury przedłużającej z tuleją podpierającą, co umożliwia ruch bez konieczności stosowania komponentów zewnętrznych.
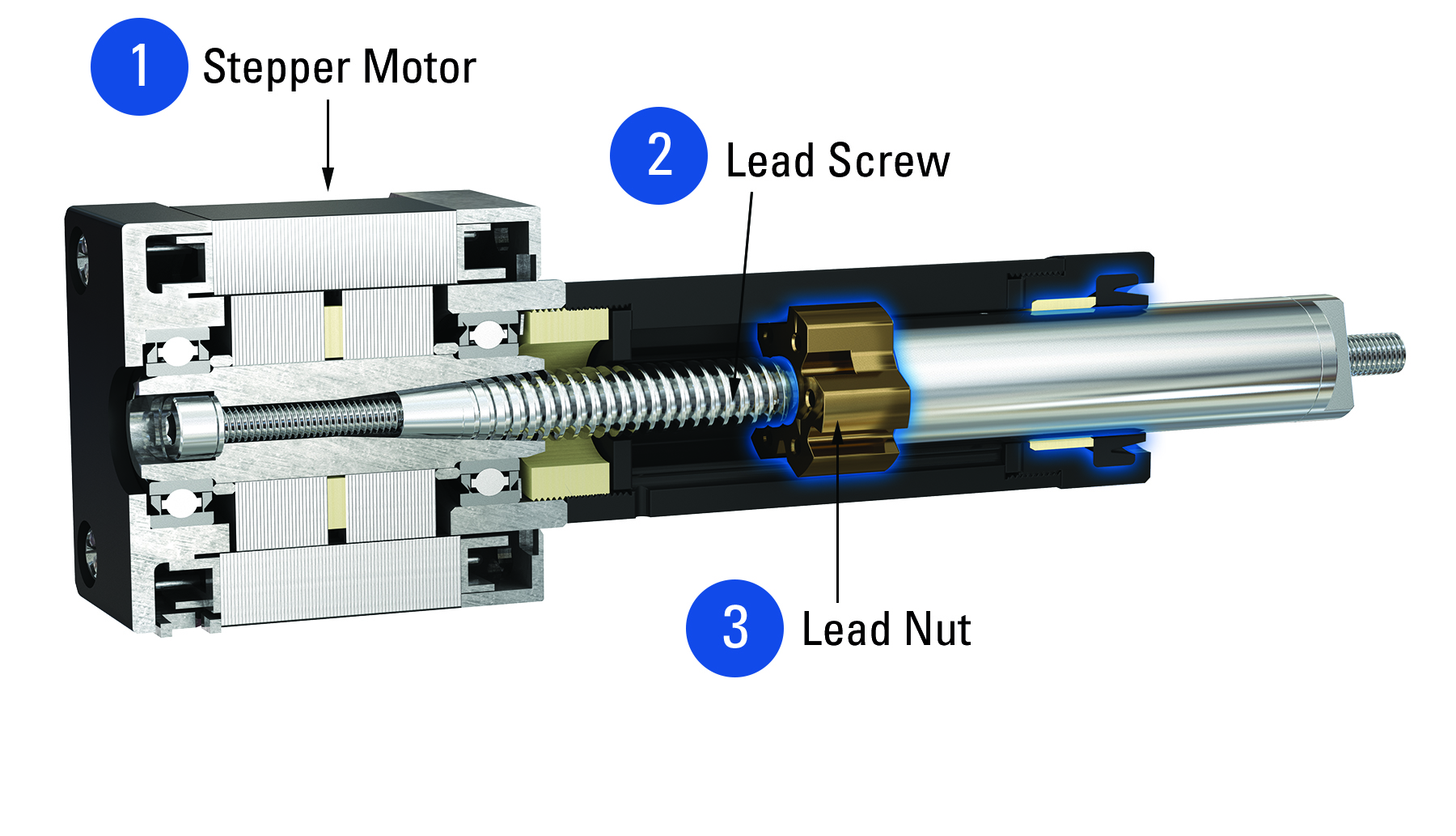
Rysunek 4. Widok przekroju konfiguracji z siłownikiem typu teleskopowego.
Instalacja
Wszystkie trzy konfiguracje SMLA mają podobny proces instalacji, który obejmuje głównie zamontowanie silnika, w razie potrzeby podparcie śruby pociągowej i zamocowanie obciążenia. Kluczowe różnice polegają na tym, gdzie mocuje się obciążenie i jak jest ono podtrzymywane. (Rysunek 5) W konfiguracjach z obracającą się śrubą obciążenie mocuje się do nakrętki pociągowej, a przy większych długościach koniec śruby pociągowej należy podeprzeć łożyskiem lub tuleją.
W przypadku konfiguracji z obracającą się nakrętką obciążenie jest mocowane do śruby pociągowej. Natomiast w przypadku konfiguracji teleskopowej obciążenie jest mocowane do końcówki do mocowania na rurze przedłużającej.
Zarówno konfiguracja obracającej się śruby, jak i obracającej się nakrętki są przeznaczone do przenoszenia wyłącznie obciążeń osiowych, dlatego do prawidłowego działania wymagane jest prowadzenie i podparcie w postaci łożysk liniowych i prowadnic liniowych. Ponieważ elementy prowadzące i podpierające są zazwyczaj zintegrowane z siłownikami teleskopowymi, w wielu przypadkach można wyeliminować konieczność stosowania łożysk liniowych i prowadnic liniowych.
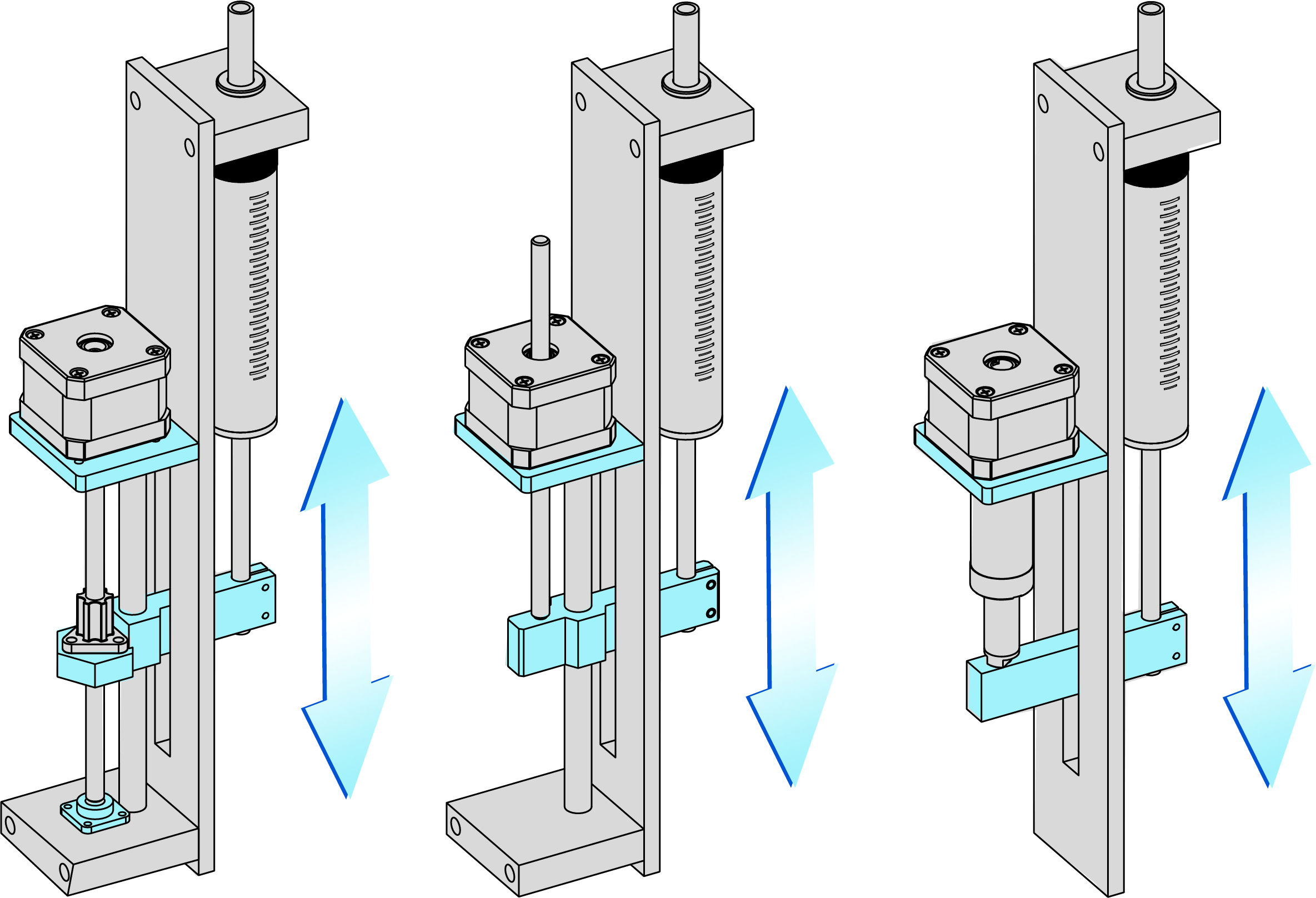
Rysunek 5. W tym przykładowym zastosowaniu w pompie do cieczy pokazano typowe konfiguracje montażu wszystkich trzech typów siłowników SMLA (od lewej do prawej: obracająca się śruba, obracająca się nakrętka, wersja teleskopowa).
Dobór wielkości do zastosowań
Duże możliwości w zakresie dostosowania oraz konfigurowalność siłownika SMLA pozwalają na jego niezliczone zastosowania. Na rysunku 6 przedstawiono kilka typowych przykładów zastosowań SMLA.
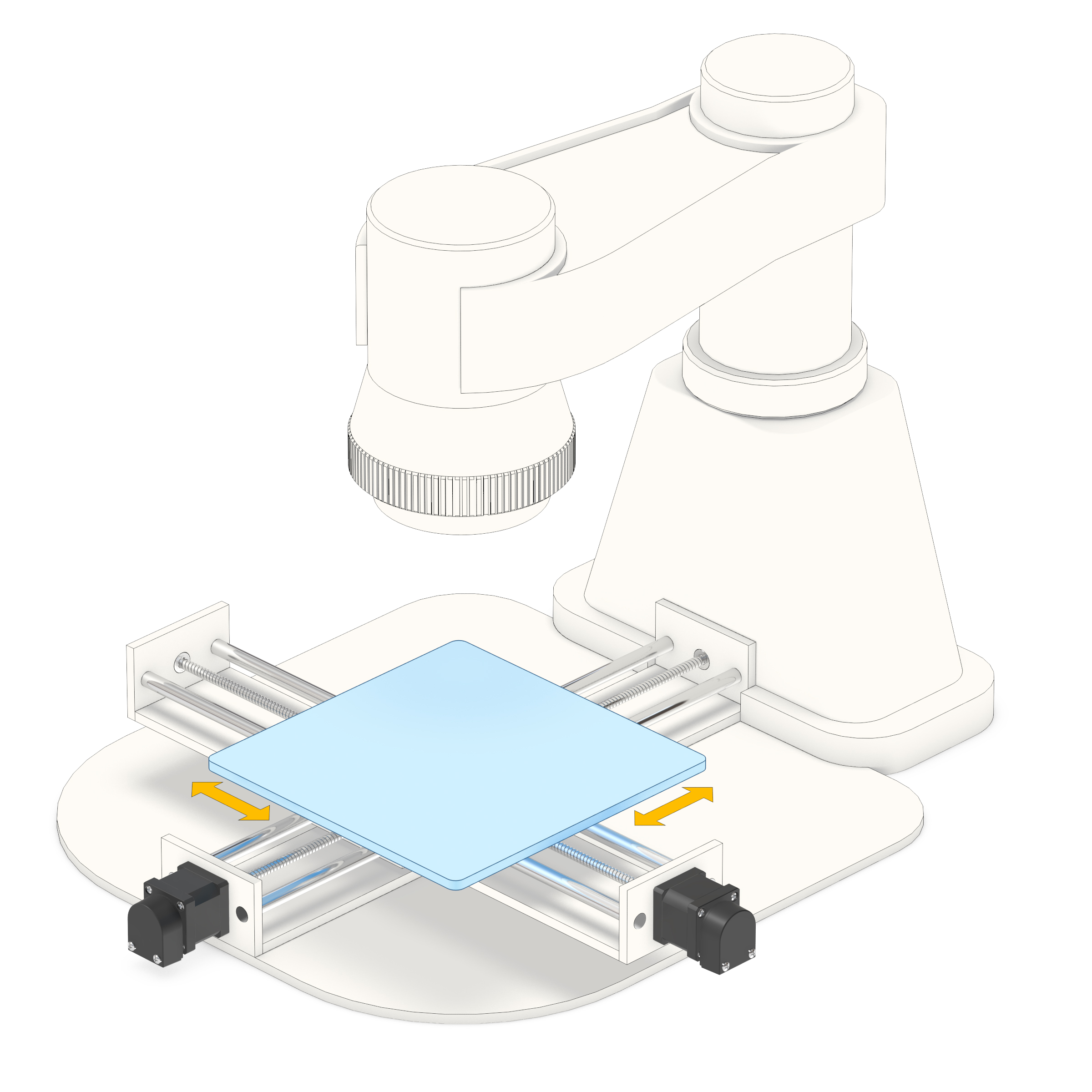
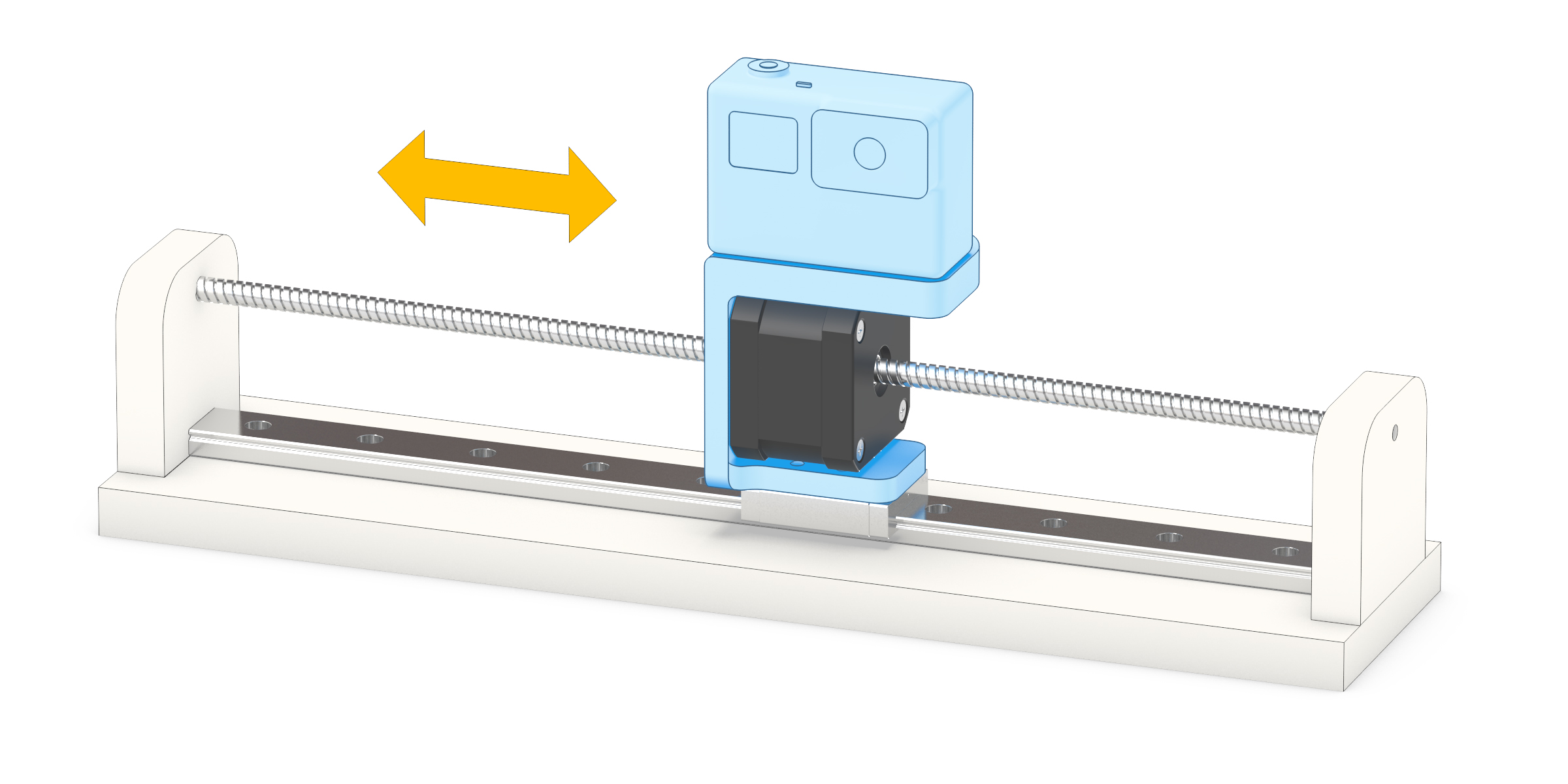
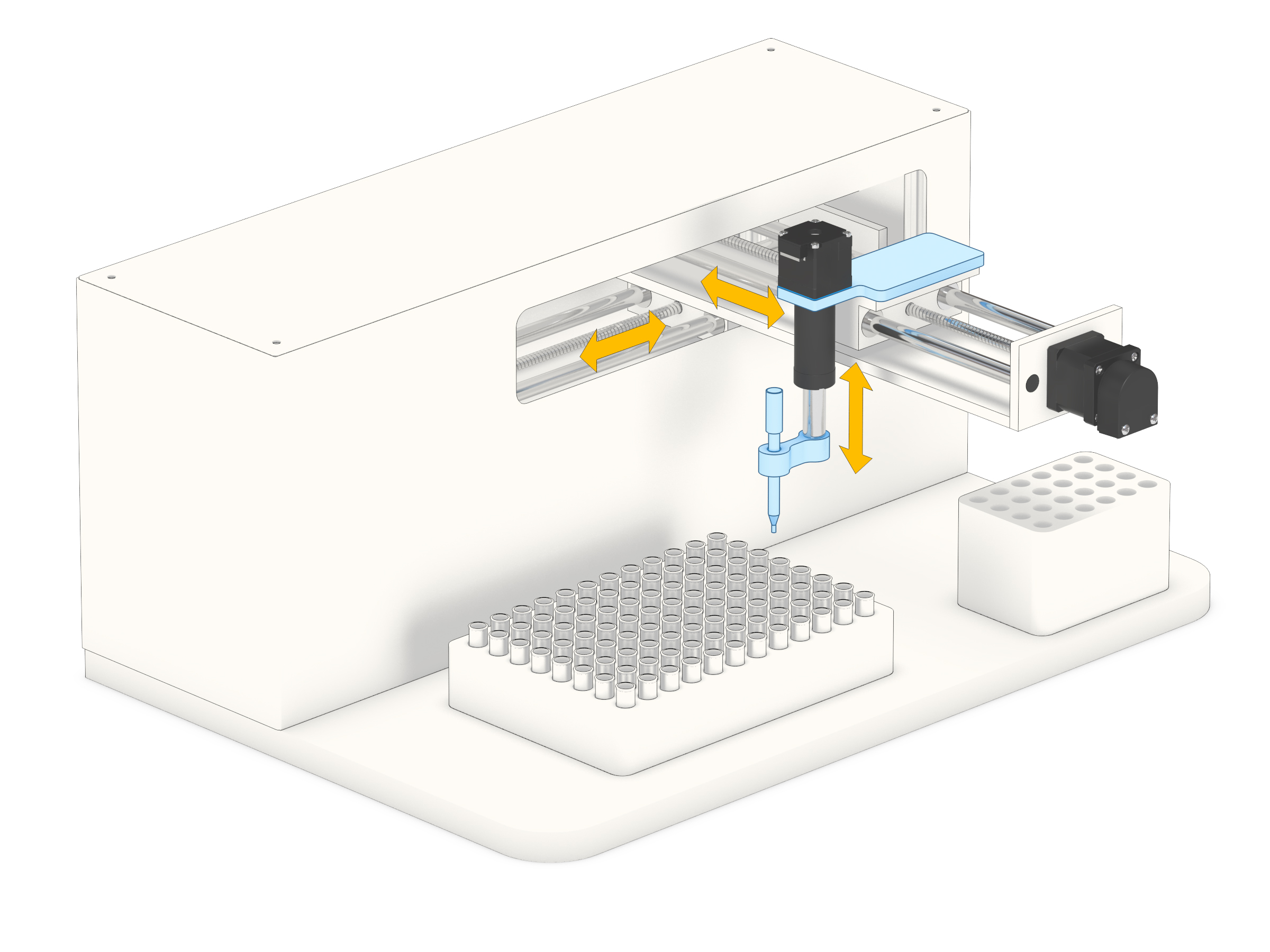
Rysunek 6. Dzięki zmniejszeniu całkowitej liczby potrzebnych elementów, siłowniki SMLA idealnie nadają się do wielu różnych zastosowań, w których przestrzeń jest ograniczona, w tym (od lewej do prawej): stopień XY (obracające się śruby), pozycjonowanie poziome (obracająca się nakrętka) oraz pipetowanie płynów (wersja teleskopowa i obracająca się śruba).
Dobór wielkości SMLA do konkretnego zastosowania wymaga zatem głównie zrozumienia ograniczeń dotyczących silnika, śruby pociągowej i nakrętki pociągowej. Każdy z tych podstawowych komponentów musi zostać odpowiednio zwymiarowany, aby zapewnić właściwą funkcjonalność i optymalną żywotność. Na szczęście większość producentów dostarcza wykresy teoretyczne wydajności uwzględniające te komponenty, co znacznie ułatwia szybkie dobranie siłownika. Wykresy te mają zwykle postać krzywej prędkości w stosunku do obciążenia i podkreślają optymalny zakres wydajności zespołu silnika, śruby i nakrętki.
Porównanie siłowników SMLA
Siłowniki SMLA umożliwiają modułowe podejście do projektowania układów ruchu, co pozwala inżynierom uzyskać rozwiązanie w pełni dostosowane do wymagań konkretnego zastosowania. Określenie, który z trzech typów SMLA jest najlepszy, zależy od wielu czynników związanych z danym zastosowaniem.
Osoby poszukujące maksymalnych możliwości dostosowania do indywidualnych potrzeb lub naprawdę unikalnego połączenia komponentów powinny rozważyć siłowniki z obracającą się śrubą. Konstrukcje z obracającą się śrubą są najczęściej stosowanym typem SMLA, więc wielu inżynierów jest już z nimi zaznajomionych.
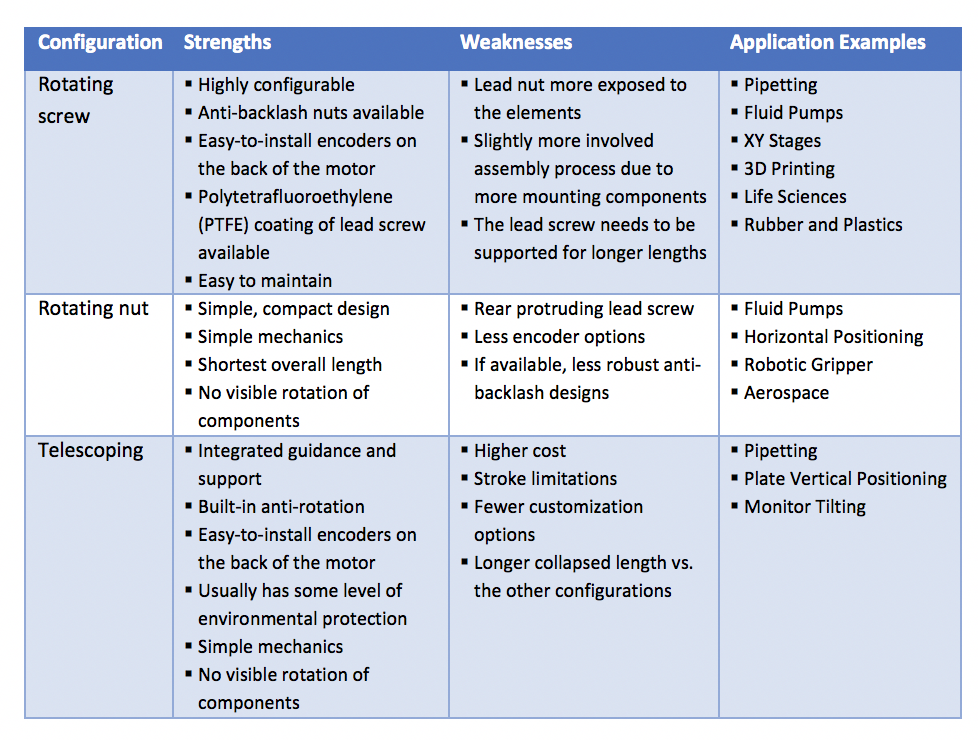
W zastosowaniach, w których korzystne byłoby zastosowanie bardziej zwartego, prostszego siłownika i które nie wymagają nakrętki bezluzowej lub wielu opcji enkodera, lepiej sprawdzają się konstrukcje z obracającą się nakrętką. Inżynierowie, którzy wolą stosować bardziej tradycyjne siłowniki prętowe, a których zastosowania mogłyby zostać ulepszone za pomocą zintegrowanych elementów prowadzących, podpierających i wbudowanego zabezpieczenia przed obrotem, powinni rozważyć teleskopową konstrukcję siłownika. Konfiguracja ta jest również warta rozważenia, jeśli istotne jest zmniejszenie liczby komponentów, ponieważ zintegrowane elementy prowadzące/wspierające eliminują konieczność zakupu elementów zewnętrznych. W tabeli 1 zestawiono najczęściej spotykane mocne i słabe strony każdej konfiguracji SMLA, a także kilka przykładów typowych zastosowań.
Aby ułatwić projektantom i integratorom przebrnięcie przez wiele opcji, producenci siłowników SMLA coraz częściej oferują narzędzia internetowe, które pomagają szybko i łatwo skonfigurować rozwiązanie odpowiednie dla danego zastosowania. Istnieją na przykład internetowe narzędzia wyboru, które pozwalają użytkownikom w ciągu kilku minut zidentyfikować siłownik SMLA, który jest odpowiedni do danego zastosowania, jednocześnie zapewniając natychmiastowy dostęp do właściwości użytkowych, modeli 3D, cen i czasu realizacji.
Zastosowanie zautomatyzowanych narzędzi doboru w kontekście zrozumienia konstrukcji, mechaniki, instalacji i rozmiarów trzech głównych typów SMLA może pomóc projektantom i integratorom układów ruchu w dokonaniu optymalnego wyboru na potrzeby wymaganych przez nich zastosowań.
Gdy projektanci i integratorzy potrzebują prostego, elastycznego i kompaktowego rozwiązania w zakresie napędzania liniowego, często sięgają po siłowniki liniowe z silnikiem krokowym (SMLA). Duża konfigurowalność siłowników SMLA jest jedną z ich największych zalet, ale przebrnięcie przez niezliczone opcje konfiguracji w celu dobrania optymalnego rozwiązania do konkretnego zastosowania może stanowić wyzwanie nawet dla najbardziej doświadczonego inżyniera ruchu. Zrozumienie wyjątkowych możliwości i ograniczeń poszczególnych rodzajów siłownika SMLA ułatwi maksymalne wykorzystanie ich dużej elastyczności.
Dlaczego warto wybrać siłowniki SMLA?
Wiele czynników sprawia, że siłowniki SMLA są chętnie wykorzystywane w rozwiązaniach napędu liniowego. Najważniejszymi z nich są duże możliwości w zakresie dostosowania i konfigurowalność. Ich przemyślana konstrukcja umożliwia konfigurację niezliczonych opcji silnika, śruby pociągowej i nakrętki pociągowej w celu opracowania unikalnego zespołu do danego zastosowania.
Siłowniki SMLA są popularne również dlatego, że silnik krokowy zapewnia podstawowy poziom sterowania bez konieczności stosowania zewnętrznych urządzeń sprzężenia zwrotnego, takich jak enkodery. Projektant może zaprogramować silnik krokowy tak, aby poruszał się do dokładnie określonego położenia przy różnych rozdzielczościach, bez konieczności przekazywania informacji zwrotnej do sterownika lub kontrolera. Dzięki temu całościowy koszt i złożoność mogą być niższe niż w przypadku serwonapędów, bezszczotkowych silników prądu stałego i innych opcji.
Silniki krokowe i śruby pociągowe są również z natury kompatybilne, co przyczynia się do wysokiej konfigurowalności SMLA. To naturalne dopasowanie jest wyraźnie widoczne w kontekście optymalnych zakresów prędkości, obciążalności i dokładności pozycjonowania.
Ponadto śruby pociągowe i silniki krokowe mogą być na wiele sposobów dostosowywane do potrzeb klienta. Śruby pociągowe można na przykład dostosować pod względem obróbki końcowej, powłoki, dokładności, kształtu i długości gwintu, natomiast w odniesieniu do silników krokowych dostępne są opcje optymalizacji uzwojenia silnika pod kątem momentu obrotowego i prędkości, a także możliwe jest dobranie okablowania, złączy, enkoderów i obróbki końcowej do danego zastosowania. Integracja silników krokowych ze śrubami pociągowymi znacząco zwiększa liczbę możliwych projektów.
Rodzaje siłowników SMLA
Chociaż liczba możliwych kombinacji jest duża, siłowniki SMLA są zwykle dostępne w trzech różnych wersjach: obracająca się śruba, obracająca się nakrętka oraz wersja teleskopowa. (rysunek 1).
Rysunek 1. Trzy rodzaje siłowników SMLA (od lewej do prawej: obracająca się śruba, obracająca się nakrętka oraz wersja teleskopowa) charakteryzują się unikalną mechaniką, która czyni je idealnymi do różnych zastosowań.
Siłowniki SMLA każdego rodzaju składają się z tych samych elementów ogólnych: silnika krokowego (1), śruby pociągowej (2) i nakrętki pociągowej (3), ale jak pokazano na rysunkach 2–4, podstawowa mechanika różni się w zależności od roli nakrętki.
Konstrukcja i mechanika obracającej się śruby
Konfiguracja obracającej się śruby, która jest również znana jako napędzana śruba pociągowa, śruba zewnętrzna liniowa, zewnętrzna nakrętka lub nakrętka przenosząca, zapewnia największą elastyczność w zakresie projektowania i możliwość dostosowania do potrzeb klienta. Jak sama nazwa wskazuje, napędzanie następuje, gdy śruba pociągowa obraca się. Po odpowiednim unieruchomieniu, aby uniemożliwić jej obracanie się wraz ze śrubą pociągową, nakrętka pociągowa będzie się przesuwać wzdłuż gwintu śruby pociągowej.
Rysunek 2. Widok przekroju konfiguracji z obracającą się śrubą.
Konstrukcja i mechanika obracającej się nakrętki
Zespół obracającej się nakrętki ma najmniejszą i najbardziej zwartą konstrukcję spośród trzech konfiguracji. Taka konstrukcja pozwala na uzyskanie najkrótszej długości po wsunięciu i długości całkowitej, a jednocześnie praktycznie nie widać obrotu żadnego z elementów zespołu. Inne nazwy tego typu siłowników to: napędzana nakrętka pociągowa, nakrętka bez blokady obrotów, nakrętka wewnętrzna i śruba przenosząca.
Mechanika siłownika SMLA z obracającą się nakrętką jest w zasadzie odwrotnością konfiguracji z obracającą się śrubą. Gdy silnik jest napędzany, zintegrowana nakrętka pociągowa na wale silnika obraca się i wymusza ruch śruby pociągowej przymocowanej do obciążenia w kierunku do i z silnika.
Rysunek 3. Widok przekroju konfiguracji z obracającą się nakrętką.
Konstrukcja i mechanika wersji teleskopowej
Siłowniki typu teleskopowego są przeznaczone do pracy w sposób zbliżony do tradycyjnych siłowników prętowych stosowanych w większości zastosowań przemysłowych, a jednocześnie mają zalety konfigurowalnego silnika krokowego i zespołu wykorzystującego obracającą się śrubę. Zasadniczo siłownik teleskopowy stanowi konfigurację obracającej się śruby z dodatkowymi elementami w obudowie, które „chwytają” nakrętkę pociągową w wypust i wykorzystują tuleję wewnętrzną do zapewnienia podparcia dla obciążenia bocznego i chwilowego. Ponieważ te konfiguracje uwzględniają prowadzenie i podparcie bezpośrednio w swojej konstrukcji, w wielu przypadkach nie będą potrzebne zewnętrzne komponenty, które w innym przypadku mogłyby być wymagane. Tego typu siłownik nazywany jest też siłownikiem z napędzaną śrubą pociągową, siłownikiem z blokadą, siłownikiem elektrycznym prętowym i siłownikiem elektrycznym.
Mechanika teleskopowego siłownika SMLA jest podobna do mechaniki konfiguracji z obracającą się śrubą. Główna różnica polega na tym, że w jego konfiguracji zintegrowano elementy prowadzące i podpierające w postaci wypustowej rury osłonowej i rury przedłużającej z tuleją podpierającą, co umożliwia ruch bez konieczności stosowania komponentów zewnętrznych.
Rysunek 4. Widok przekroju konfiguracji z siłownikiem typu teleskopowego.
Instalacja
Wszystkie trzy konfiguracje SMLA mają podobny proces instalacji, który obejmuje głównie zamontowanie silnika, w razie potrzeby podparcie śruby pociągowej i zamocowanie obciążenia. Kluczowe różnice polegają na tym, gdzie mocuje się obciążenie i jak jest ono podtrzymywane. (Rysunek 5) W konfiguracjach z obracającą się śrubą obciążenie mocuje się do nakrętki pociągowej, a przy większych długościach koniec śruby pociągowej należy podeprzeć łożyskiem lub tuleją.
W przypadku konfiguracji z obracającą się nakrętką obciążenie jest mocowane do śruby pociągowej. Natomiast w przypadku konfiguracji teleskopowej obciążenie jest mocowane do końcówki do mocowania na rurze przedłużającej.
Zarówno konfiguracja obracającej się śruby, jak i obracającej się nakrętki są przeznaczone do przenoszenia wyłącznie obciążeń osiowych, dlatego do prawidłowego działania wymagane jest prowadzenie i podparcie w postaci łożysk liniowych i prowadnic liniowych. Ponieważ elementy prowadzące i podpierające są zazwyczaj zintegrowane z siłownikami teleskopowymi, w wielu przypadkach można wyeliminować konieczność stosowania łożysk liniowych i prowadnic liniowych.
Rysunek 5. W tym przykładowym zastosowaniu w pompie do cieczy pokazano typowe konfiguracje montażu wszystkich trzech typów siłowników SMLA (od lewej do prawej: obracająca się śruba, obracająca się nakrętka, wersja teleskopowa).
Dobór wielkości do zastosowań
Duże możliwości w zakresie dostosowania oraz konfigurowalność siłownika SMLA pozwalają na jego niezliczone zastosowania. Na rysunku 6 przedstawiono kilka typowych przykładów zastosowań SMLA.
Rysunek 6. Dzięki zmniejszeniu całkowitej liczby potrzebnych elementów, siłowniki SMLA idealnie nadają się do wielu różnych zastosowań, w których przestrzeń jest ograniczona, w tym (od lewej do prawej): stopień XY (obracające się śruby), pozycjonowanie poziome (obracająca się nakrętka) oraz pipetowanie płynów (wersja teleskopowa i obracająca się śruba).
Dobór wielkości SMLA do konkretnego zastosowania wymaga zatem głównie zrozumienia ograniczeń dotyczących silnika, śruby pociągowej i nakrętki pociągowej. Każdy z tych podstawowych komponentów musi zostać odpowiednio zwymiarowany, aby zapewnić właściwą funkcjonalność i optymalną żywotność. Na szczęście większość producentów dostarcza wykresy teoretyczne wydajności uwzględniające te komponenty, co znacznie ułatwia szybkie dobranie siłownika. Wykresy te mają zwykle postać krzywej prędkości w stosunku do obciążenia i podkreślają optymalny zakres wydajności zespołu silnika, śruby i nakrętki.
Porównanie siłowników SMLA
Siłowniki SMLA umożliwiają modułowe podejście do projektowania układów ruchu, co pozwala inżynierom uzyskać rozwiązanie w pełni dostosowane do wymagań konkretnego zastosowania. Określenie, który z trzech typów SMLA jest najlepszy, zależy od wielu czynników związanych z danym zastosowaniem.
Osoby poszukujące maksymalnych możliwości dostosowania do indywidualnych potrzeb lub naprawdę unikalnego połączenia komponentów powinny rozważyć siłowniki z obracającą się śrubą. Konstrukcje z obracającą się śrubą są najczęściej stosowanym typem SMLA, więc wielu inżynierów jest już z nimi zaznajomionych.
W zastosowaniach, w których korzystne byłoby zastosowanie bardziej zwartego, prostszego siłownika i które nie wymagają nakrętki bezluzowej lub wielu opcji enkodera, lepiej sprawdzają się konstrukcje z obracającą się nakrętką. Inżynierowie, którzy wolą stosować bardziej tradycyjne siłowniki prętowe, a których zastosowania mogłyby zostać ulepszone za pomocą zintegrowanych elementów prowadzących, podpierających i wbudowanego zabezpieczenia przed obrotem, powinni rozważyć teleskopową konstrukcję siłownika. Konfiguracja ta jest również warta rozważenia, jeśli istotne jest zmniejszenie liczby komponentów, ponieważ zintegrowane elementy prowadzące/wspierające eliminują konieczność zakupu elementów zewnętrznych. W tabeli 1 zestawiono najczęściej spotykane mocne i słabe strony każdej konfiguracji SMLA, a także kilka przykładów typowych zastosowań.
Aby ułatwić projektantom i integratorom przebrnięcie przez wiele opcji, producenci siłowników SMLA coraz częściej oferują narzędzia internetowe, które pomagają szybko i łatwo skonfigurować rozwiązanie odpowiednie dla danego zastosowania. Istnieją na przykład internetowe narzędzia wyboru, które pozwalają użytkownikom w ciągu kilku minut zidentyfikować siłownik SMLA, który jest odpowiedni do danego zastosowania, jednocześnie zapewniając natychmiastowy dostęp do właściwości użytkowych, modeli 3D, cen i czasu realizacji.
Zastosowanie zautomatyzowanych narzędzi doboru w kontekście zrozumienia konstrukcji, mechaniki, instalacji i rozmiarów trzech głównych typów SMLA może pomóc projektantom i integratorom układów ruchu w dokonaniu optymalnego wyboru na potrzeby wymaganych przez nich zastosowań.