Thomson Linear Motion Optmized


Siłownik liniowy z silnikiem krokowym
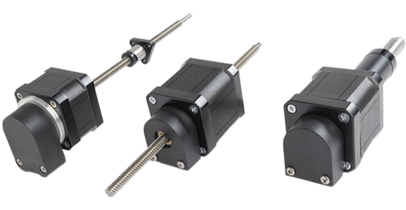
Siłowniki liniowe z silnikiem krokowym firmy Thomson to połączenie hybrydowego silnika krokowego i precyzyjnej śruby pociągowej w jednej kompaktowej obudowie. Aktualnie są one oferowane w trzech podstawowych konfiguracjach: z obracającą się śrubą (MLS), z obracającą się nakrętką (MLN) oraz z siłownikiem (MLA).
Standardowe siłowniki liniowe z silnikiem krokowym

Śruba obrotowa (MLS)
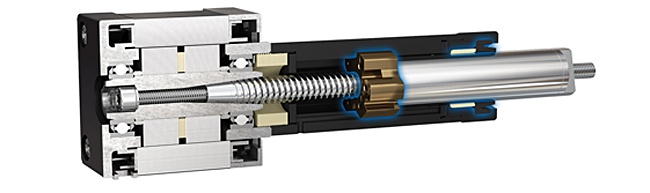
W zespołach MLS silnik krokowy obraca śrubę pociągową, co powoduje przesuwanie elementu napędzanego przymocowanego do nakrętki pociągowej.
Nakrętka obrotowa (MLN)
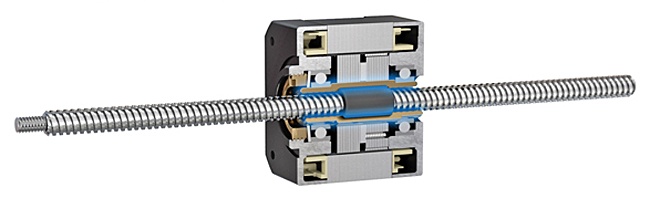
W zespołach MLN silnik obraca nakrętkę umieszczoną w korpusie silnika krokowego. Ruch uzyskuje się przez utwierdzenie silnika, co powoduje przesuwanie elementu napędzanego przymocowanego do śruby pociągowej, lub przez utwierdzenie śruby pociągowej, co powoduje przesuwanie elementu napędzanego przymocowanego do silnika.
Rotary Encoders Available as a Standard Option

Enkodery obrotowe przekazują w czasie rzeczywistym informacje zwrotne o położeniu, prędkości, kierunku i wielu innych przydatnych parametrach ruchu.
Thomson już w standardzie dołącza wstępnie zmontowane enkodery do wszystkich siłowników liniowych z silnikami krokowymi.
Niestandardowe opcje siłowników liniowych z silnikiem krokowym

Łącząc najnowsze technologie silnika krokowego i śruby pociągowej, wstępnie zaprojektowane siłowniki liniowe z silnikiem krokowym (SMLA) zapewniają kompaktowy system ruchu liniowego w zastosowaniach wymagających wysokiej precyzji.
Dlaczego warto wybrać siłowniki liniowe z silnikiem krokowym firmy Thomson?
Firma Thomson oferuje dwie podstawowe konfiguracje: z obracającą się śrubą (MLS) i obracającą się nakrętką (MLN). Dzięki otwartej architekturze zespołów z napędzaną silnikiem obracającą się śrubą lub nakrętką pociągową mają one zastosowanie w systemach, w których występują prowadnice zewnętrzne lub w których wymagana jest duża elastyczność konstrukcji.
Opcje dostosowania
Firma Thomson współpracuje z producentami oryginalnego sprzętu na całym świecie, aby rozwiązywać problemy, poprawiać wydajność i zwiększać wartość dostarczaną klientom. Nasza technologia i doświadczenie w zakresie zastosowań mogą być wykorzystane, aby pomóc wyjść poza standardowe produkty i dopasować się dokładnie do potrzeb Twojego następnego projektu.Od czego można zacząć?
Firma Thomson udostępnia online szeroki zakres materiałów, które pomagają w podjęciu decyzji na każdym etapie procesu zakupu:VIDEO: Stepper Motor Linear Actuator Assembly Configurations
Precision lead screws can be combined with a stepper motor in a number of ways. At Thomson, we offer three configurations of stepper motor linear actuators to meet the various needs of our customers' applications. Learn more about them and discover which of them can benefit your linear motion designs.
VIDEO: What is a Stepper Motor and How is it Useful for Linear Motion?
Combined with a precision lead screw, the stepper motor is utilized in one of Thomson’s main product families – stepper motor linear actuators. This video takes a closer look at this motor, its main components, how they work, and why they are useful in linear motion applications in comparison to other types of motors.

FILM WIDEO: Siłowniki liniowe z silnikiem krokowym w technologii Taper-Lock
Zobacz, w jaki sposób prawidłowo serwisować w terenie siłowniki liniowe z silnikiem krokowym firmy Thomson. Te precyzyjne i dopracowane zespoły łączą w sobie hybrydowy silnik krokowy oraz śrubę pociągową w jednej kompaktowej obudowie, co zapewnia im wiele oczywistych zalet — jest to konstrukcja o mniejszych wymiarach, trwalsza i bardziej wydajna od rozwiązań alternatywnych.
Technical Articles
-
Leveraging Stepper Motor Linear Actuator Configurability
When designers and integrators need simple, flexible and compact linear actuation, they often turn to stepper motor linear actuators (SMLAs). The high configurability of SMLAs is among their greatest virtues, but sorting through myriad configuration options to tailor the optimal solution for a particular application can be a challenge for even the most seasoned motion engineer. Understanding the unique capabilities and limitations of each type of SMLA will make it easier to take maximum advantage of their wide range of flexibility.
-
Wdrażanie prowadnic zapobiegających obrotom do siłowników liniowych z silnikiem krokowym
Integracja śrub pociągowych z silnikami krokowymi jest prostą i opłacalną metodą uzyskania precyzyjnego ruchu liniowego. Jednak osiągnięcie tej precyzji wymaga prowadnicy zapobiegającej obrotom, która musi być albo dodana zewnętrznie przez użytkownika, albo zaprojektowana przez producenta. Określenie, która opcja ma sens, wymaga analizy zapotrzebowania na system prowadzenia oraz rozważenia zalet i wad każdego podejścia.
-
Zredukuj swoje zespoły ruchu liniowego do pojedynczego elementu dzięki siłownikom z napędzaną śrubą pociągową
Jeśli chodzi o określenie ruchu liniowego w maszynie, projektanci systemów mają wiele opcji do wyboru. Dokonanie właściwego wyboru może mieć wpływ na łatwość instalacji, powierzchnię użytkową i koszty eksploatacji. Powszechnie stosowanym mechanizmem napędowym dla uzyskania ruchu liniowego jest silnik krokowy i zespół oparty na zewnętrznie podpartej śrubie pociągowej. Prostszym i łatwiejszym do zainstalowania rozwiązaniem jest jednak wybór mechanizmu napędowego z wbudowaną prowadnicą i podparciem, co eliminuje potrzebę stosowania zewnętrznych komponentów, które normalnie pełniłyby te funkcje, oraz związaną z nimi złożoność.
Specyfikacja siłowników liniowych z silnikiem krokowym [rozmiary calowe]:
| S = śruba obrotowa (MLS), N = nakrętka obrotowa (MLN) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Posuw liniowy na jeden pełny krok (w mikrocalach) |
Skok gwintu [mm] |
Oznaczenie skoku gwintu (mm) |
Silnik | |||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | |||||||||
| Oznaczenie średnicy [w setnych częściach średnicy wewn.] | ||||||||||||
| 18 | 18 | 25 | 25 | 31 | 37 | 31 | 37 | 43 | 50 | |||
| 0,063² | 0,013 | 0013 | S | S,N | S¹³ | S¹³ | S,N¹³ | S,N | S¹³ | |||
| 0,125² | 0,025 | 0025 | S | S,N | S¹ | S,N | S¹³ | |||||
| 0,157 | 0,031 | 0031 | S | S,N | S¹ | S,N | ||||||
| 0,165 | 0,033 | 0033 | S¹ | |||||||||
| 0,179 | 0,036 | 0036 | S | S,N | ||||||||
| 0,200 | 0,040 | 0040 | S¹ | S,N | ||||||||
| 0,209 | 0,042 | 0042 | S | S,N | S¹³ | S¹³ | S,N¹³ | S,N | ||||
| 0,250 | 0,050 | 0050 | S | S,N | S | S,N | S¹ | S,N | S¹³ | S¹³ | ||
| 0,313 | 0,063 | 0063 | S | S,N | S | S,N | S¹ | |||||
| 0,357 | 0,071 | 0071 | S | S,N | ||||||||
| 0,394 | 0,079 | 0079 | S | S,N | S¹ | S,N | ||||||
| 0,417 | 0,083 | 0083 | S | S¹ | S,N | S,N | ||||||
| 0,490 | 0,098 | 0098 | S¹ | |||||||||
| 0,500 | 0,100 | 0100 | S | S,N | S | S,N | S¹ | |||||
| 0,591 | 0,118 | 0118 | S | S,N | ||||||||
| 0,625 | 0,125 | 0125 | S | S,N¹ | S | S,N | S¹ | S,N | S¹ | |||
| 0,787 | 0,157 | 0157 | S | S,N | ||||||||
| 0,833 | 0,167 | 0,167 | S | S | S,N | S,N | ||||||
| 0,960 | 0,192 | 0,192 | S | S,N | ||||||||
| 1,000 | 0,200 | 0200 | S | S,N | S | S,N | S¹ | S,N | S¹ | |||
| 1,180 | 0,236 | 0236 | S¹ | |||||||||
| 1,250 | 0,250 | 0250 | S | S,N | S | S | S,N | S,N | S¹ | S¹ | ||
| 1,500 | 0300 | 0300 | S¹ | S,N | ||||||||
| 1,665 | 0333 | 0333 | S | S,N¹³ | ||||||||
| 1,875 | 0375 | 0375 | S | S,N¹³ | S¹ | S,N | ||||||
| 2,000 | 0,400 | 0,400 | S | S,N | ||||||||
| 2,500 | 0,500 | 0500 | S | S,N¹³ | S | S,N | S | S | S,N | S,N | S¹ | S¹ |
| 3,750 | 0,750 | 0750 | S | S,N | S¹³ | S,N | ||||||
| 4,000 | 0,800 | 0,800 | S¹³ | |||||||||
| 5,000 | 1,000 | 1000 | S³ | S³ | S,N³ | S,N³ | S¹³ | |||||
| 6,000 | 1,200 | 1,200 | S¹³ | S,N | ||||||||
| 7,500 | 1,500 | 1,500 | S¹³ | |||||||||
1. Niektóre skoki gwintu mogą być niedostępne w konfiguracjach z obracającą się nakrętką (MLN) o wysokiej wydajności oraz w przypadku niektórych nakrętek z systemem kasowania luzu. W celu uzyskania dodatkowych informacji należy skontaktować się z firmą Thomson.
2. Śruby pociągowe o małym skoku mogą mieć znacznie niższą obciążalność niż tradycyjne śruby pociągowe.
3. Śruba pociągowa niedostępna w wersji precyzyjnej (P)
Specyfikacja siłowników liniowych z silnikiem krokowym [rozmiary metryczne]:
| S = śruba obrotowa (MLS), N = nakrętka obrotowa (MLN) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Posuw liniowy na jeden pełny krok (w mm) |
Skok gwintu [mm] |
Oznaczenie skoku gwintu² (mm) |
Silnik | ||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | ||||||||
| Oznaczenie średnicy | |||||||||||
| M04 | M04 | M06 | M06 | M08 | M10 | M08 | M10 | M12 | |||
| 3 | 0,6 | 006 | S | S,N | |||||||
| 5 | 1,0 | 010 | S | S,N | S | S,N | |||||
| 6 | 1,2 | 012 | S | S,N | |||||||
| 10 | 2,0 | 020 | S | S | S,N | S,N | S¹ | ||||
| 15 | 3,0 | 030 | S | S,N | S¹ | ||||||
| 20 | 4,0 | 040 | S | S,N | S | S,N | S¹ | ||||
| 25 | 5,0 | 050 | S | S,N | |||||||
| 30 | 6,0 | 060 | S | S,N | S¹ | S,N | S¹ | ||||
| 40 | 8,0 | 080 | S³ | S,N³ | S | S,N | |||||
| 50 | 10,0 | 100 | S | S,N | S¹ | ||||||
| 60 | 12,0 | 120 | S | S,N | S | S¹ | S,N | S,N | |||
| 75 | 15,0 | 150 | S¹ | ||||||||
| 80 | 16,0 | 160 | S¹ | ||||||||
| 90 | 18,0 | 180 | S | S,N | |||||||
| 100 | 20,0 | 200 | S³ | S | S,N³ | S,N | |||||
| 125 | 25,0 | 250 | S¹³ | ||||||||
| 175 | 35,0 | 350 | S¹³ | S,N | |||||||
| 225 | 45,0 | 450 | S¹³ | ||||||||
1. Niektóre skoki gwintu mogą być niedostępne w konfiguracjach z obracającą się nakrętką (MLN) o wysokiej wydajności oraz w przypadku niektórych nakrętek z systemem kasowania luzu. W celu uzyskania dodatkowych informacji należy skontaktować się z firmą Thomson.
3. Śruba pociągowa niedostępna w wersji precyzyjnej (P)
Główne cechy siłowników liniowych z silnikiem krokowym
- Zwiększona gęstość momentu obrotowego
- Zwiększona wydajność
- Obrotowa śruba lub obrotowa nakrętka
- Dostępne niestandardowe rozmiary / przewody
- Zalety technologii Taper-Lock
- Mniejszy hałas
- Wersje calowe i metryczne
Przykłady zastosowań
- Urządzenia medyczne
- Stoły pozycjonujące X-Y
- Drukarki 3D
- Zawory sterujące w systemach ogrzewania, wentylacji i klimatyzacji
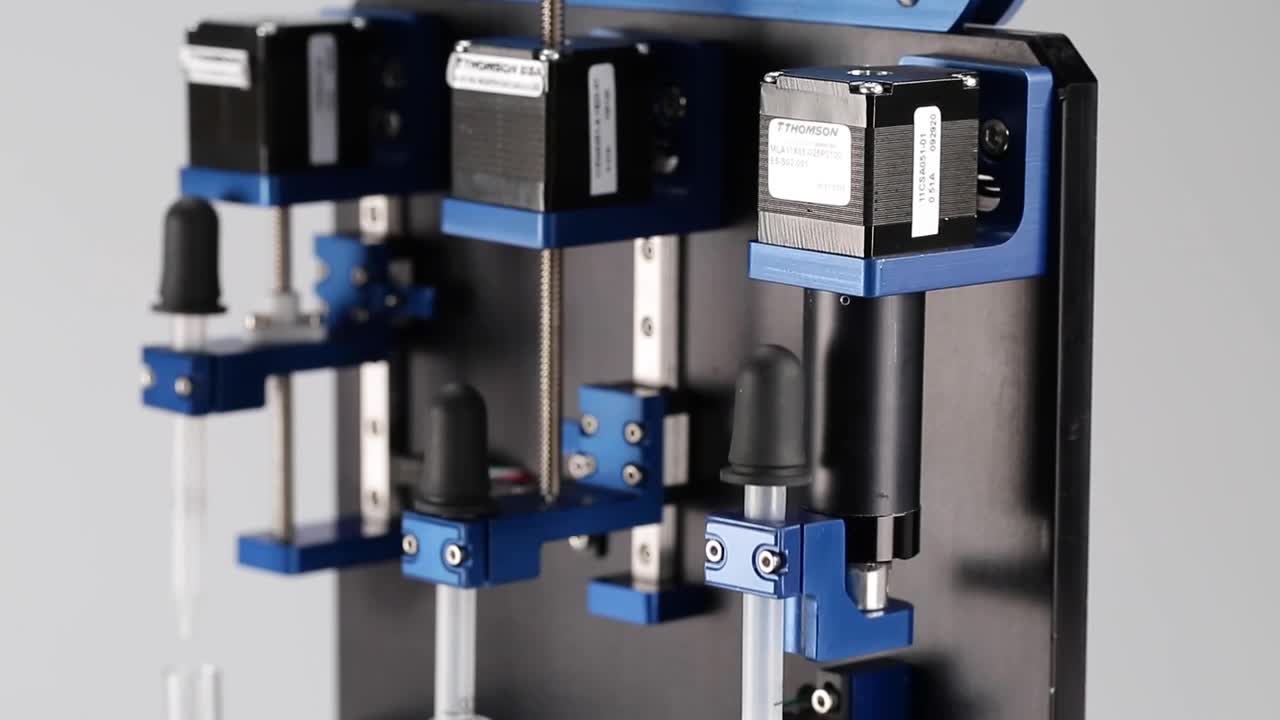
- Urządzenia do pipetowania
- Obrabiarki CNC
- Pompy płynów/pompy infuzyjne
Wybierz model CAD:
MLS

MLN
