

Tasarımcılar ve entegratörler basit, esnek ve kompakt lineer çalıştırmaya ihtiyaç duyduklarında, genellikle kademeli motor lineer aktüatörlere (SMLA'lar) yönelirler. SMLA'ların yüksek yapılandırılabilirliği, en büyük avantajları arasındadır, ancak belirli bir uygulama için optimum çözümü uyarlamak üzere çok sayıda yapılandırma seçeneği arasında sıralama yapmak, en deneyimli hareket mühendisi için bile zor olabilir. Her SMLA tipinin benzersiz özellik ve sınırlamalarını anlamak, geniş esneklik yelpazesinden maksimum düzeyde yararlanmayı kolaylaştıracaktır.
Neden SMLA?
Başta yüksek düzeyde özelleştirme ve yapılandırılabilirlikleri olmak üzere, birçok faktör SMLA'ları lineer çalıştırma için arzu edilir hale getirmektedir. Verimli tasarımları, her bir uygulama için benzersiz bir tertibatta sayısız motor, kılavuz vida ve kılavuz somun seçeneklerinin yapılandırılmasını sağlar.
Ayrıca SMLA'lar, kademeli motorun kodlayıcılar gibi harici geri besleme cihazları gerektirmeden temel bir kontrol düzeyi sağlaması sebebiyle de popülerdir. Tasarımcı, bir sürücüye veya kontrolöre herhangi bir geri bildirim gerektirmeden çeşitli çözünürlüklerde kesin bir konuma hareket etmek üzere bir kademeli motoru programlayabilir. Bu, genel maliyeti ve karmaşıklığı servolar, fırçasız DC ve diğer motor seçeneklerinden daha düşük hale getirebilir.
Kademeli motorlar ve kılavuz vidalar doğal olarak uyumludur, bu da SMLA'nın yüksek yapılandırılabilirliğine katkıda bulunur. Bu doğal uyum, optimum hız aralıkları, yük kapasiteleri ve konumsal doğruluklar söz konusu olduğunda kendini gösterir.
Ayrıca kılavuz vidalar ve kademeli motorlar, özelleştirme için birçok mevcut seçenek sunar. Örneğin kılavuz vidalar, uç işleme, kaplama, doğruluk, diş formu ve uzunluğu için özelleştirilebilirken, kademeli motorlar motor sargılarını tork ve hız için optimize etme ve uygulamaya özel kablolama, konektörler, kodlayıcılar ve uç kapağı işleme gibi seçenekler sunar. Kademeli motorları kılavuz vidalarla entegre etmek, olası tasarımların sayısını önemli ölçüde artırır.
SMLA Tipleri
Olası kombinasyonların sayısı yüksek olsa da, SMLA'lar genellikle üç farklı tipte mevcuttur: döner vida, döner somun ve teleskopik. (Şekil 1)
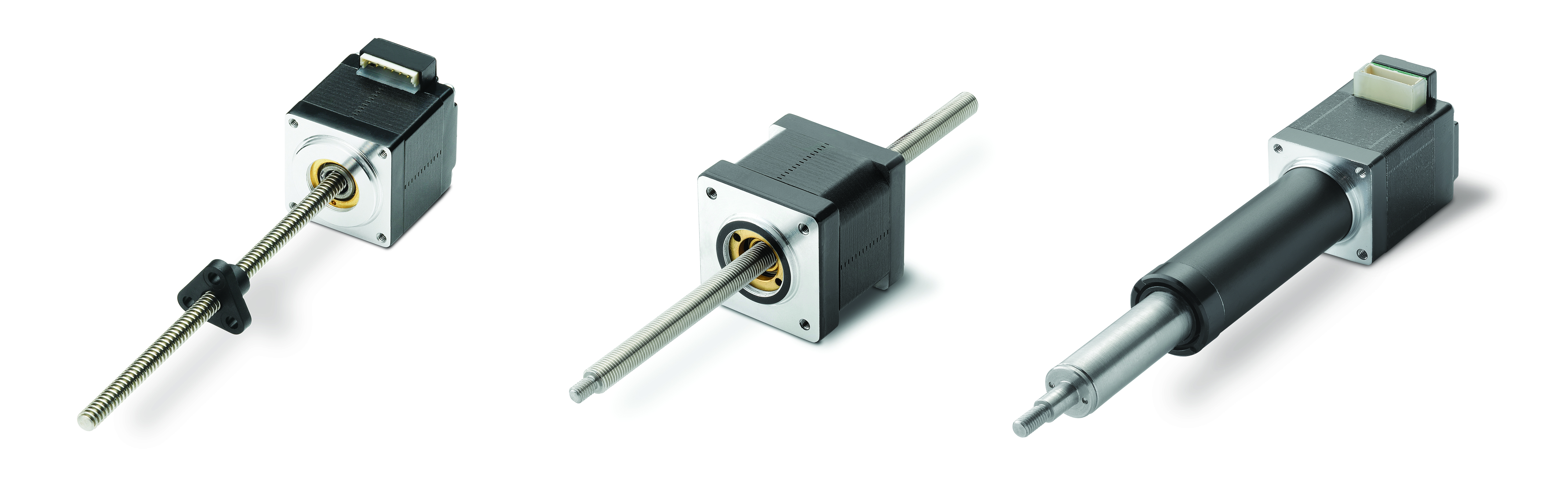
Şekil 1.Üç SMLA tipi (soldan sağa: döner vida, döner somun ve teleskopik), onları çeşitli uygulamalar için ideal kılan benzersiz mekaniğe sahiptir.
Her bir SMLA tipi aynı genel bileşenlerden oluşur: bir kademeli motor (1), kılavuz vida (2) ve kılavuz somun (3), ancak Şekil 2-4'te gösterildiği gibi, ana mekanik, somunun rolüne bağlı olarak farklılık gösterir.
Döner Vida Yapısı ve Mekaniği
Motorlu kılavuz vida, harici lineer, harici somun veya çevirme somunu olarak da bilinen döner vida konfigürasyonu, en fazla tasarım esnekliğine ve özelleştirmeye olanak tanır. Adından da anlaşılacağı gibi, kılavuz vida döndüğünde çalıştırma gerçekleşir. Kılavuz vidayla dönmesini önlemek için uygun şekilde engellediğinde, kılavuz somun, kılavuz vidanın dişli uzunluğu boyunca çevrilecektir.
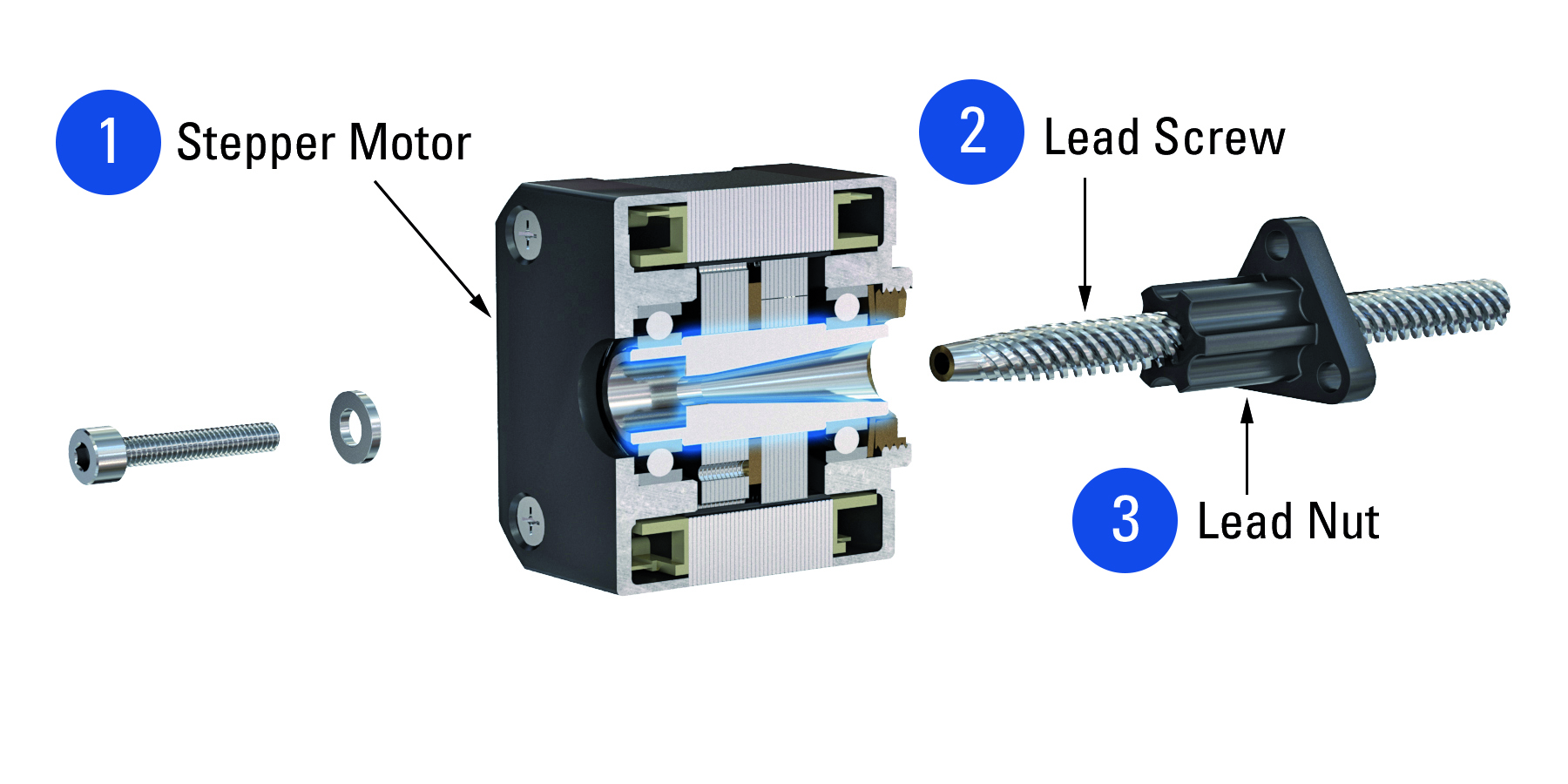
Şekil 2. Döner vida konfigürasyonunun kesit görünümü.
Döner Somun Yapısı ve Mekaniği
Döner somun tertibatı, üç konfigürasyon arasında en minimal ve kompakt tasarıma sahiptir. Bu tasarım, en kısa geri çekilmiş ve toplam uzunluğu sağlarken, hiçbir bileşeninde neredeyse hiç görünür dönüşe sahip değildir. Bu tip aktüatör için diğer isimler motorlu kılavuz somun, sabit olmayan, dahili somun ve çevirme vidasıdır.
Döner somun SMLA'nın mekaniği, temelde döner vida konfigürasyonunun tersidir. Motor çalıştırıldığında, motor şaftı içindeki entegre kılavuz somun döner ve bir yüke bağlı kılavuz vidayı motorun içine ve dışına aktarmak için indükler.
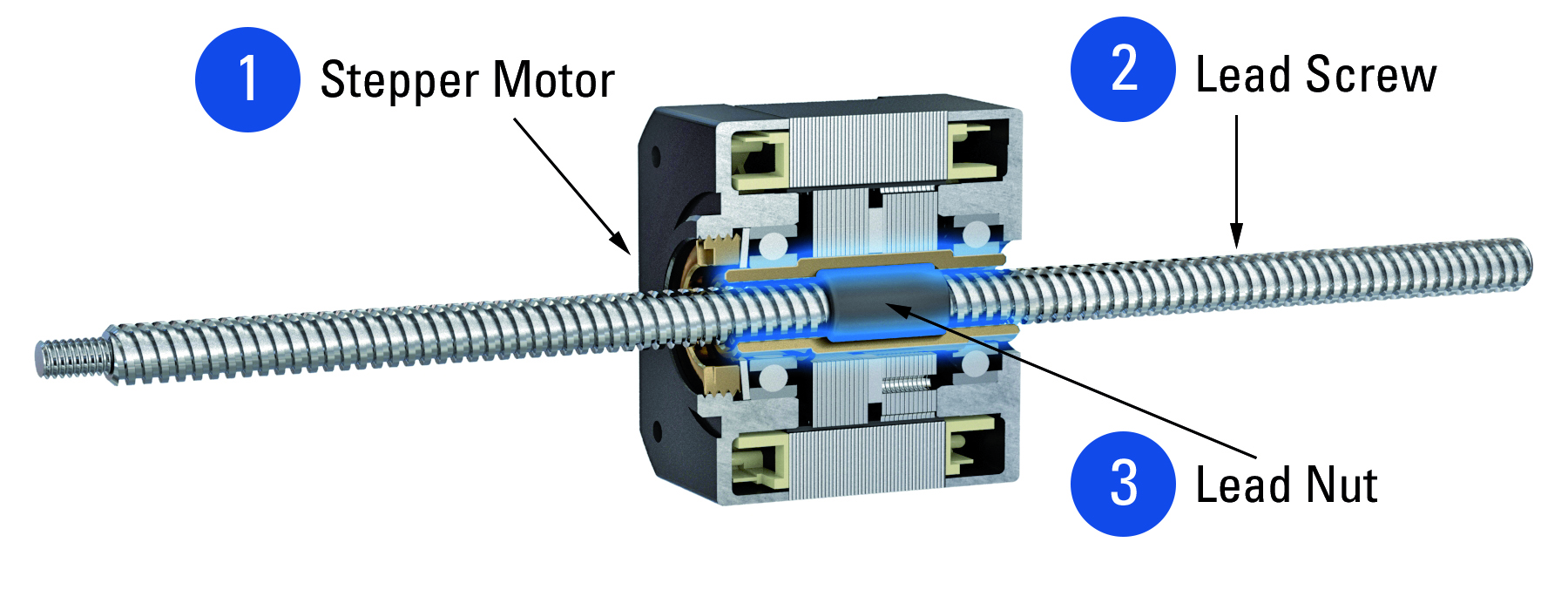
Şekil 3. Döner somun konfigürasyonunun kesit görünümü.
Teleskopik Tipin Yapısı ve Mekaniği
Teleskopik tip aktüatörlerin, çoğu endüstriyel uygulamada bulunan geleneksel çubuk tipi aktüatörlere daha çok benzer şekilde performans göstermesi amaçlanırken, yine de yapılandırılabilir kademeli motor ve kılavuz vidalı ünitenin avantajlarına sahiptir. Temelde teleskopik aktüatör, kılavuz somunu bir yiv içinde "yakalayan" ve bir miktar yan ve moment yükü desteği sağlamak için dahili bir burç kullanan ekstra mahfaza bileşenlerine sahip bir döner vida konfigürasyonudur. Bu konfigürasyonlar kılavuzluk ve desteği doğrudan tasarımlarına dahil ettiğinden, çoğu durumda, aksi takdirde gerekli olabilecek harici bileşenlere ihtiyaç duymazlar. Bu tip aktüatör için diğer isimler motorlu kılavuz vidalı aktüatör, sabit, elektrikli çubuk ve elektrikli silindirdir.
Teleskopik SMLA'nın mekaniği, bir döner vida konfigürasyonununkine benzer. Temel fark, konfigürasyonunun, harici bileşenlere ihtiyaç duymadan harekete izin veren bir destek burcuna sahip yivli kapak borusu ve uzatma borusu şeklinde kılavuz ve destek bileşenlerini entegre etmesidir.
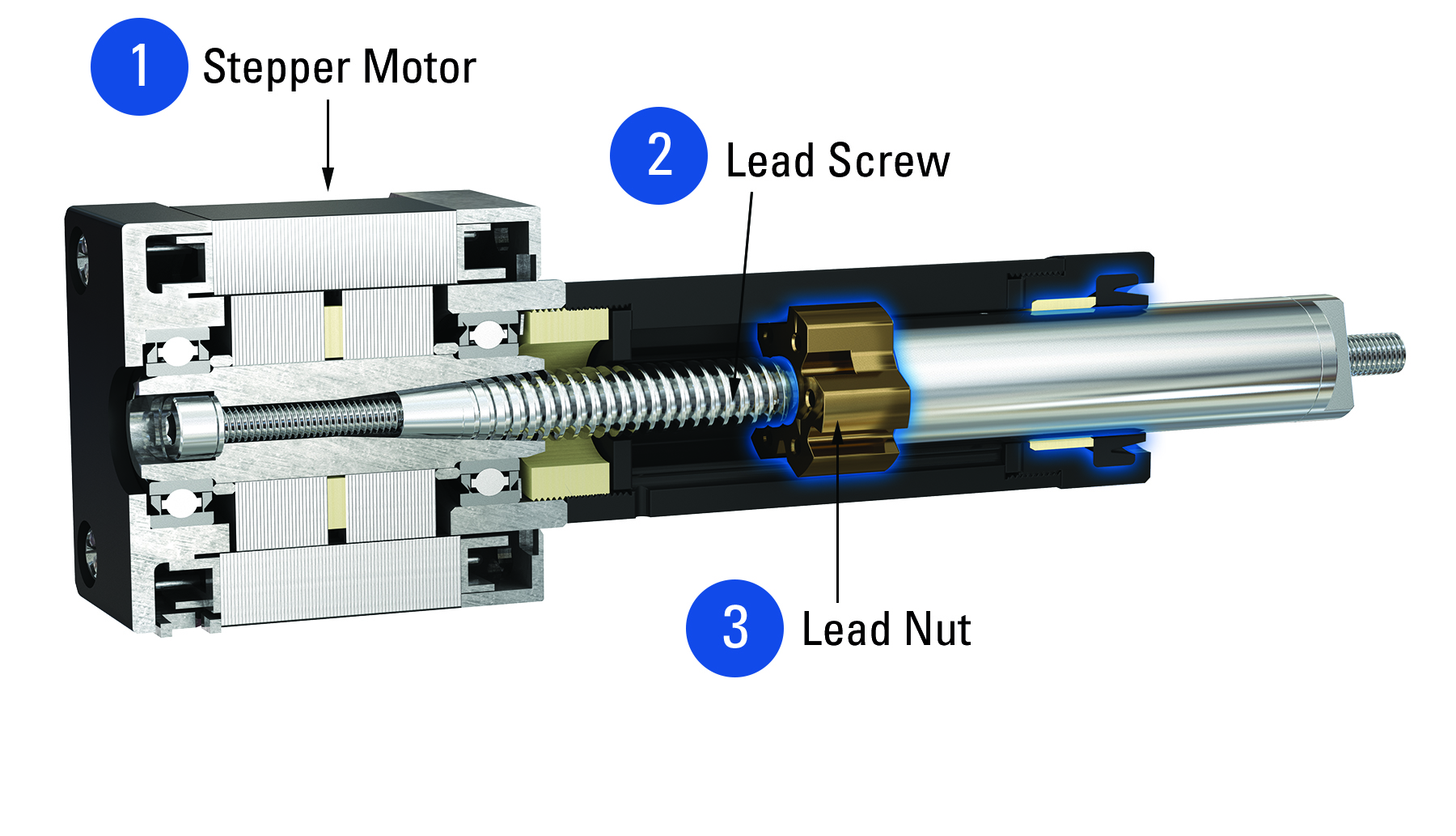
Şekil 4. Teleskopik tip konfigürasyonunun kesit görünümü.
Kurulum
Üç SMLA konfigürasyonunun tümü, esas olarak motorun monte edilmesi, gerekirse kılavuz vidanın desteklenmesi ve yükün bağlanmasından oluşan benzer bir kurulum sürecine sahiptir. Temel farklılıklar, yükün bağlandığı yer ve nasıl desteklendiğidir. (Şekil 5) Döner vida konfigürasyonlarında, yük kılavuz somuna bağlanır ve kılavuz vidanın ucunun daha fazla uzunluklar için bir yatak veya burç ile desteklenmesi gerekecektir.
Döner somun konfigürasyonlarında, yük kılavuz vidaya bağlanır. Teleskopik konfigürasyonda ise yük, uzatma borusunun uç bağlantısına bağlanacaktır.
Hem döner vida hem de somun konfigürasyonlarının yalnızca eksenel yüklere dayanması amaçlanmıştır, bu nedenle doğru işlev için lineer yataklar ve kılavuz raylar şeklinde kılavuzluk ve destek gerekli olacaktır. Yönlendirme ve destek tipik olarak teleskopik aktüatörlere entegre edildiğinden, birçok senaryoda lineer yataklara ve kılavuz raylara olan ihtiyaç ortadan kaldırılabilir.
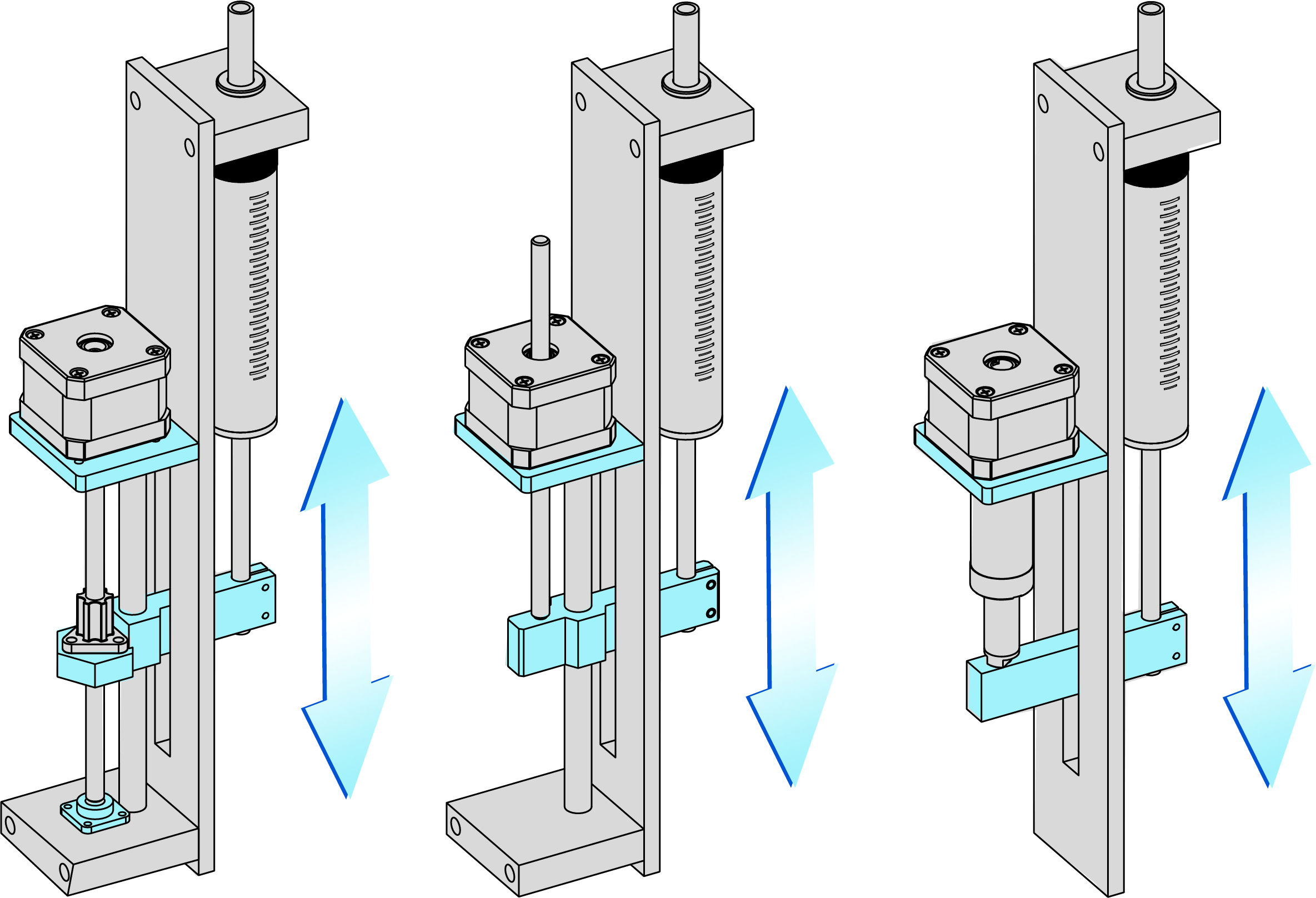
Şekil 5. Bu sıvı pompası uygulama örneği, üç SMLA'nın tümü için tipik montaj konfigürasyonlarını gösterir (soldan sağa: döner vida, döner somun, teleskopik).
Uygulamalar için Boyutlandırma
SMLA'nın yüksek düzeyde özelleştirme ve yapılandırılabilirliği, ona sayısız uygulama olanağı sağlar. Şekil 6, SMLA uygulamalarının birkaç yaygın örneğini göstermektedir.
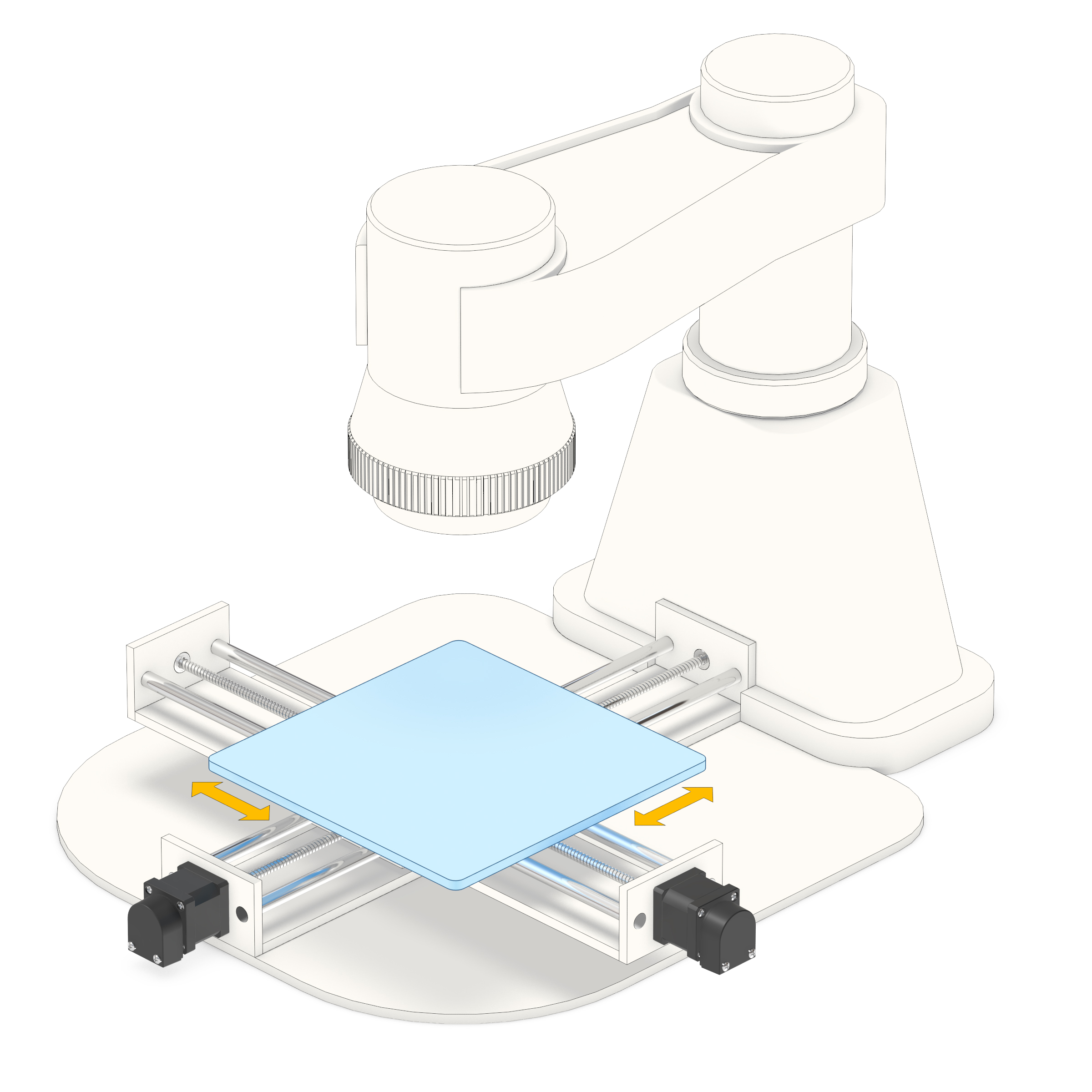
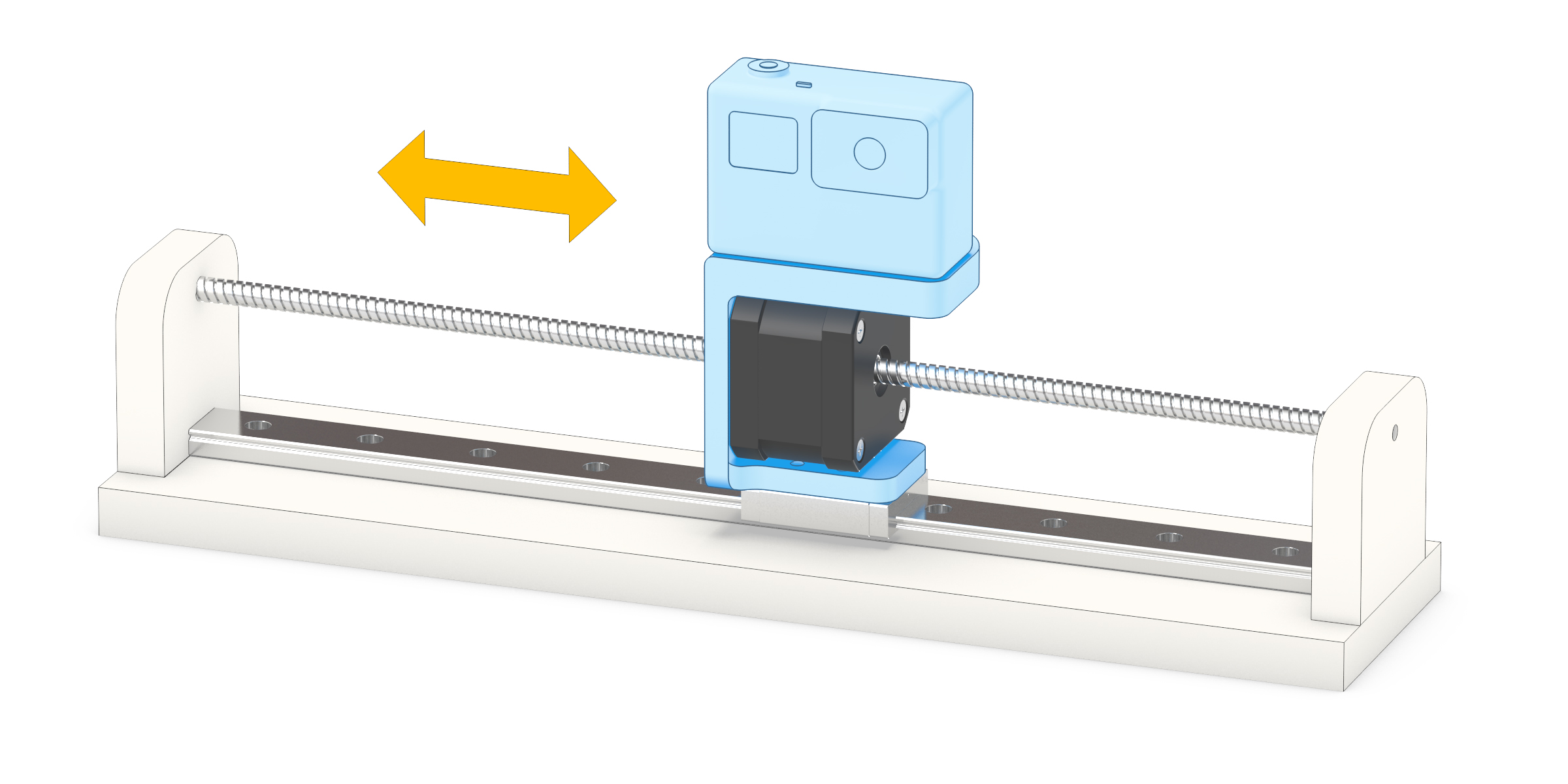
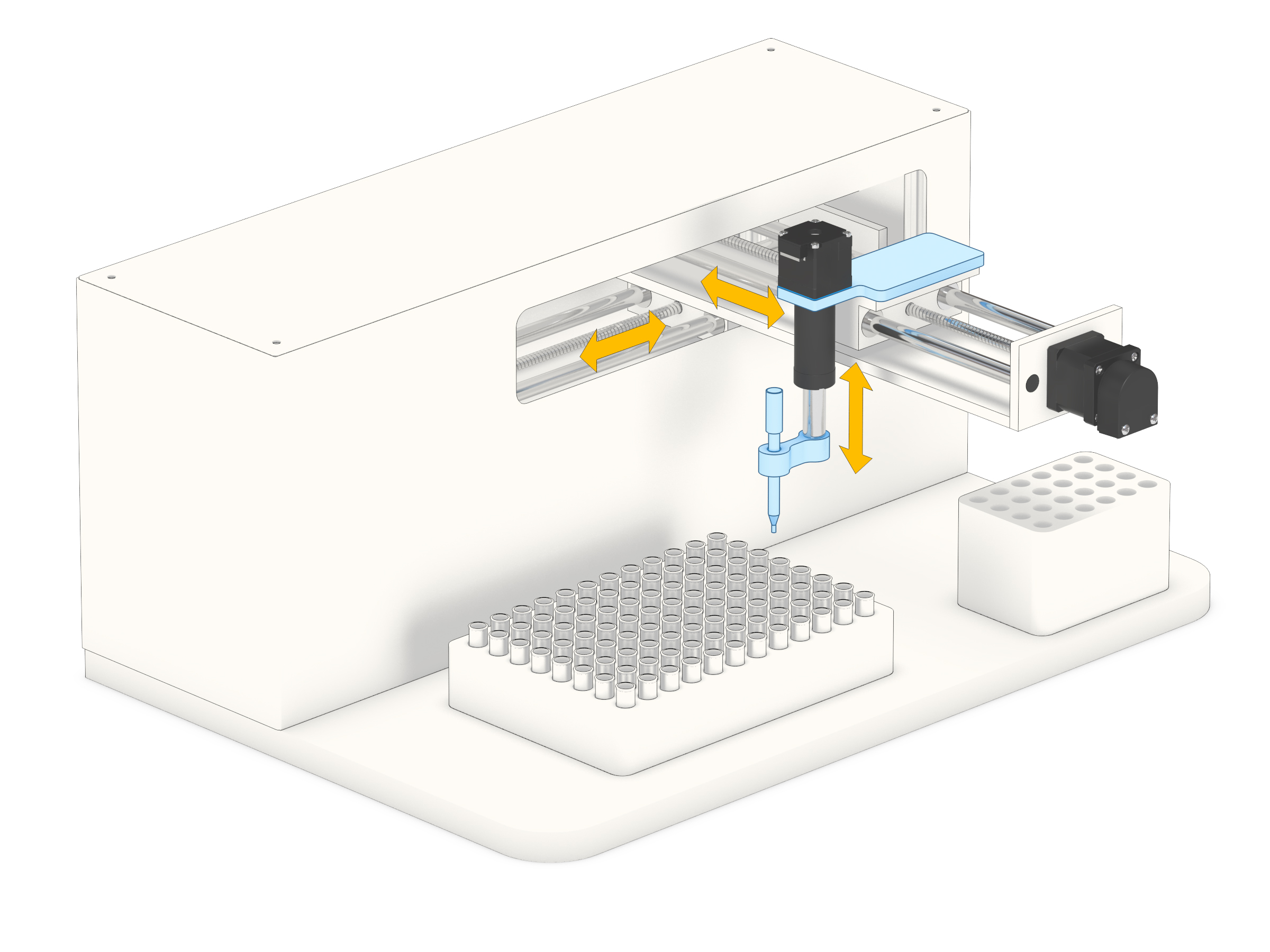
Şekil 6. İhtiyaç duyulan toplam bileşen sayısını azaltan SMLA'lar, aşağıdakiler dahil olmak üzere çok çeşitli yerden kazandıran uygulamalar için idealdir (soldan sağa): XY aşaması (döner vidalar), yatay konumlandırma (döner somun) ve sıvı pipetleme (teleskopik ve döner vida).
Belirli bir uygulama için bir SMLA'yı boyutlandırmak, esas olarak motoru, kılavuz vidayı ve kılavuz somun sınırlamalarını anlamayı içerir. Bu temel bileşenlerin her biri, uygun işlevsellik ve optimum ömür sağlamak için uygun şekilde boyutlandırılmalıdır. Neyse ki çoğu üretici, bu bileşenleri dikkate alan teorik performans grafikleri sağlayarak bir aktüatörü hızlı bir şekilde boyutlandırmayı çok daha kolaylaştırır. Bu grafikler genellikle hız-yük eğrisi şeklinde olur ve motor, vida ve somun kombinasyonunun optimum performans aralığını vurgular.
SMLA'ların Karşılaştırılması
SMLA'lar, mühendislerin özel uygulama gereksinimlerine son derece uygun hale getirilmiş bir çözüm elde etmelerine olanak veren modüler bir hareket sistemi tasarım yaklaşımı sağlar. Üç SMLA'dan hangisinin en iyi olduğunu belirlemek, uygulamaya dayalı birçok faktöre bağlıdır.
Maksimum özelleştirme veya gerçekten benzersiz bir bileşen kombinasyonu arayanlar, döner vidalı aktüatörleri değerlendirmelidir. Döner vida tasarımları en yaygın olarak kullanılan SMLA tipidir, bu nedenle birçok mühendis bunlara oldukça aşina olacaktır.
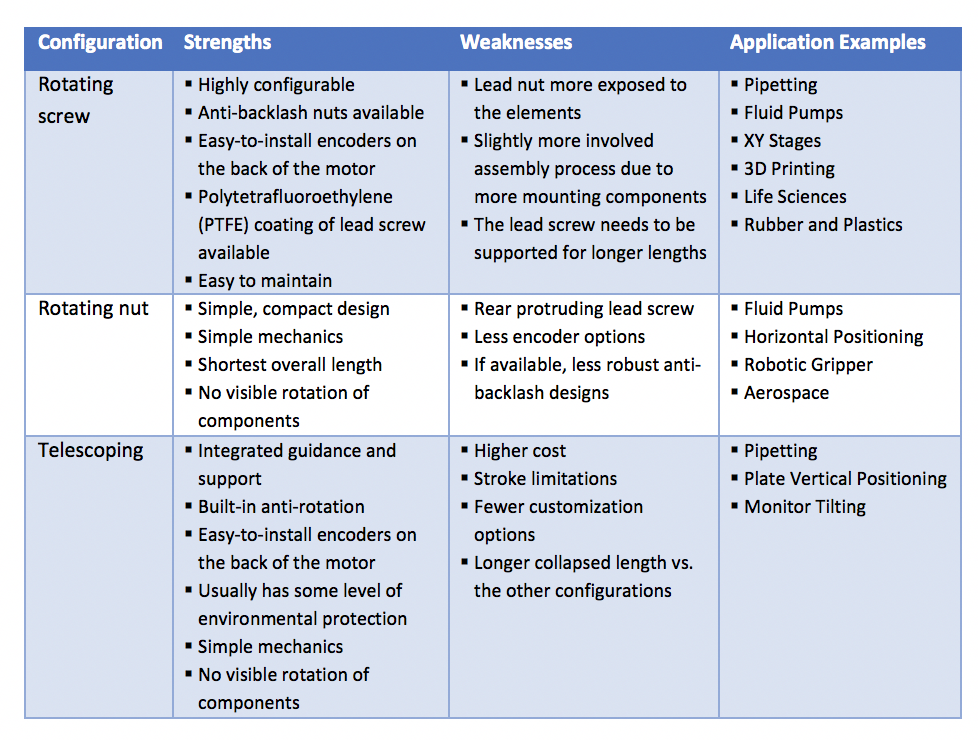
Daha kompakt, daha basit bir aktüatörden yararlanacak ve geri tepme önleyici somun veya birçok kodlayıcı seçeneği gerektirmeyen uygulamalar, döner somun tasarımları ile daha iyi sunulabilir. Daha geleneksel, çubuk tipi bir aktüatör tasarımına geçmeyi tercih eden ve uygulamaları entegre yönlendirme, destek ve yerleşik anti-rotasyondan yararlanacak olan mühendisler, teleskopik tasarımı değerlendirmelidir. Entegre yönlendirme/destek bileşenleri harici bileşenleri satın alma ihtiyacını ortadan kaldırdığından, bu konfigürasyon toplam bileşen sayısını azaltmak önemli olduğunda da dikkate alınmaya değerdir. Tablo 1, her bir SMLA konfigürasyonunun en yaygın güçlü ve zayıf yönlerini ve ayrıca birkaç yaygın uygulama örneğini özetlemektedir.
Tasarımcıların ve entegratörlerin birçok seçeneği tamamlamalarına yardımcı olmak için SMLA üreticileri, uygulamaları için çözümleri hızlı ve kolay bir şekilde yapılandırmalarına yardımcı olacak çevrimiçi araçları giderek daha fazla sunuyor. Örneğin, performans özelliklerine, 3D modellere, fiyatlandırmaya ve teslim süresine anında erişirken, kullanıcıların uygulamaları için doğru SMLA'yı birkaç dakika içinde belirlemelerini sağlayan çevrimiçi seçim araçları vardır.
Üç ana SMLA tipinin tasarım, mekanik, kurulum ve boyutlandırma anlayışı bağlamında otomatik seçim araçlarını uygulamak, hareket tasarımcılarını ve entegratörlerini uygulamaları için en uygun seçime yönlendirmeye yardımcı olabilir.
Tasarımcılar ve entegratörler basit, esnek ve kompakt lineer çalıştırmaya ihtiyaç duyduklarında, genellikle kademeli motor lineer aktüatörlere (SMLA'lar) yönelirler. SMLA'ların yüksek yapılandırılabilirliği, en büyük avantajları arasındadır, ancak belirli bir uygulama için optimum çözümü uyarlamak üzere çok sayıda yapılandırma seçeneği arasında sıralama yapmak, en deneyimli hareket mühendisi için bile zor olabilir. Her SMLA tipinin benzersiz özellik ve sınırlamalarını anlamak, geniş esneklik yelpazesinden maksimum düzeyde yararlanmayı kolaylaştıracaktır.
Neden SMLA?
Başta yüksek düzeyde özelleştirme ve yapılandırılabilirlikleri olmak üzere, birçok faktör SMLA'ları lineer çalıştırma için arzu edilir hale getirmektedir. Verimli tasarımları, her bir uygulama için benzersiz bir tertibatta sayısız motor, kılavuz vida ve kılavuz somun seçeneklerinin yapılandırılmasını sağlar.
Ayrıca SMLA'lar, kademeli motorun kodlayıcılar gibi harici geri besleme cihazları gerektirmeden temel bir kontrol düzeyi sağlaması sebebiyle de popülerdir. Tasarımcı, bir sürücüye veya kontrolöre herhangi bir geri bildirim gerektirmeden çeşitli çözünürlüklerde kesin bir konuma hareket etmek üzere bir kademeli motoru programlayabilir. Bu, genel maliyeti ve karmaşıklığı servolar, fırçasız DC ve diğer motor seçeneklerinden daha düşük hale getirebilir.
Kademeli motorlar ve kılavuz vidalar doğal olarak uyumludur, bu da SMLA'nın yüksek yapılandırılabilirliğine katkıda bulunur. Bu doğal uyum, optimum hız aralıkları, yük kapasiteleri ve konumsal doğruluklar söz konusu olduğunda kendini gösterir.
Ayrıca kılavuz vidalar ve kademeli motorlar, özelleştirme için birçok mevcut seçenek sunar. Örneğin kılavuz vidalar, uç işleme, kaplama, doğruluk, diş formu ve uzunluğu için özelleştirilebilirken, kademeli motorlar motor sargılarını tork ve hız için optimize etme ve uygulamaya özel kablolama, konektörler, kodlayıcılar ve uç kapağı işleme gibi seçenekler sunar. Kademeli motorları kılavuz vidalarla entegre etmek, olası tasarımların sayısını önemli ölçüde artırır.
SMLA Tipleri
Olası kombinasyonların sayısı yüksek olsa da, SMLA'lar genellikle üç farklı tipte mevcuttur: döner vida, döner somun ve teleskopik. (Şekil 1)
Şekil 1.Üç SMLA tipi (soldan sağa: döner vida, döner somun ve teleskopik), onları çeşitli uygulamalar için ideal kılan benzersiz mekaniğe sahiptir.
Her bir SMLA tipi aynı genel bileşenlerden oluşur: bir kademeli motor (1), kılavuz vida (2) ve kılavuz somun (3), ancak Şekil 2-4'te gösterildiği gibi, ana mekanik, somunun rolüne bağlı olarak farklılık gösterir.
Döner Vida Yapısı ve Mekaniği
Motorlu kılavuz vida, harici lineer, harici somun veya çevirme somunu olarak da bilinen döner vida konfigürasyonu, en fazla tasarım esnekliğine ve özelleştirmeye olanak tanır. Adından da anlaşılacağı gibi, kılavuz vida döndüğünde çalıştırma gerçekleşir. Kılavuz vidayla dönmesini önlemek için uygun şekilde engellediğinde, kılavuz somun, kılavuz vidanın dişli uzunluğu boyunca çevrilecektir.
Şekil 2. Döner vida konfigürasyonunun kesit görünümü.
Döner Somun Yapısı ve Mekaniği
Döner somun tertibatı, üç konfigürasyon arasında en minimal ve kompakt tasarıma sahiptir. Bu tasarım, en kısa geri çekilmiş ve toplam uzunluğu sağlarken, hiçbir bileşeninde neredeyse hiç görünür dönüşe sahip değildir. Bu tip aktüatör için diğer isimler motorlu kılavuz somun, sabit olmayan, dahili somun ve çevirme vidasıdır.
Döner somun SMLA'nın mekaniği, temelde döner vida konfigürasyonunun tersidir. Motor çalıştırıldığında, motor şaftı içindeki entegre kılavuz somun döner ve bir yüke bağlı kılavuz vidayı motorun içine ve dışına aktarmak için indükler.
Şekil 3. Döner somun konfigürasyonunun kesit görünümü.
Teleskopik Tipin Yapısı ve Mekaniği
Teleskopik tip aktüatörlerin, çoğu endüstriyel uygulamada bulunan geleneksel çubuk tipi aktüatörlere daha çok benzer şekilde performans göstermesi amaçlanırken, yine de yapılandırılabilir kademeli motor ve kılavuz vidalı ünitenin avantajlarına sahiptir. Temelde teleskopik aktüatör, kılavuz somunu bir yiv içinde "yakalayan" ve bir miktar yan ve moment yükü desteği sağlamak için dahili bir burç kullanan ekstra mahfaza bileşenlerine sahip bir döner vida konfigürasyonudur. Bu konfigürasyonlar kılavuzluk ve desteği doğrudan tasarımlarına dahil ettiğinden, çoğu durumda, aksi takdirde gerekli olabilecek harici bileşenlere ihtiyaç duymazlar. Bu tip aktüatör için diğer isimler motorlu kılavuz vidalı aktüatör, sabit, elektrikli çubuk ve elektrikli silindirdir.
Teleskopik SMLA'nın mekaniği, bir döner vida konfigürasyonununkine benzer. Temel fark, konfigürasyonunun, harici bileşenlere ihtiyaç duymadan harekete izin veren bir destek burcuna sahip yivli kapak borusu ve uzatma borusu şeklinde kılavuz ve destek bileşenlerini entegre etmesidir.
Şekil 4. Teleskopik tip konfigürasyonunun kesit görünümü.
Kurulum
Üç SMLA konfigürasyonunun tümü, esas olarak motorun monte edilmesi, gerekirse kılavuz vidanın desteklenmesi ve yükün bağlanmasından oluşan benzer bir kurulum sürecine sahiptir. Temel farklılıklar, yükün bağlandığı yer ve nasıl desteklendiğidir. (Şekil 5) Döner vida konfigürasyonlarında, yük kılavuz somuna bağlanır ve kılavuz vidanın ucunun daha fazla uzunluklar için bir yatak veya burç ile desteklenmesi gerekecektir.
Döner somun konfigürasyonlarında, yük kılavuz vidaya bağlanır. Teleskopik konfigürasyonda ise yük, uzatma borusunun uç bağlantısına bağlanacaktır.
Hem döner vida hem de somun konfigürasyonlarının yalnızca eksenel yüklere dayanması amaçlanmıştır, bu nedenle doğru işlev için lineer yataklar ve kılavuz raylar şeklinde kılavuzluk ve destek gerekli olacaktır. Yönlendirme ve destek tipik olarak teleskopik aktüatörlere entegre edildiğinden, birçok senaryoda lineer yataklara ve kılavuz raylara olan ihtiyaç ortadan kaldırılabilir.
Şekil 5. Bu sıvı pompası uygulama örneği, üç SMLA'nın tümü için tipik montaj konfigürasyonlarını gösterir (soldan sağa: döner vida, döner somun, teleskopik).
Uygulamalar için Boyutlandırma
SMLA'nın yüksek düzeyde özelleştirme ve yapılandırılabilirliği, ona sayısız uygulama olanağı sağlar. Şekil 6, SMLA uygulamalarının birkaç yaygın örneğini göstermektedir.
Şekil 6. İhtiyaç duyulan toplam bileşen sayısını azaltan SMLA'lar, aşağıdakiler dahil olmak üzere çok çeşitli yerden kazandıran uygulamalar için idealdir (soldan sağa): XY aşaması (döner vidalar), yatay konumlandırma (döner somun) ve sıvı pipetleme (teleskopik ve döner vida).
Belirli bir uygulama için bir SMLA'yı boyutlandırmak, esas olarak motoru, kılavuz vidayı ve kılavuz somun sınırlamalarını anlamayı içerir. Bu temel bileşenlerin her biri, uygun işlevsellik ve optimum ömür sağlamak için uygun şekilde boyutlandırılmalıdır. Neyse ki çoğu üretici, bu bileşenleri dikkate alan teorik performans grafikleri sağlayarak bir aktüatörü hızlı bir şekilde boyutlandırmayı çok daha kolaylaştırır. Bu grafikler genellikle hız-yük eğrisi şeklinde olur ve motor, vida ve somun kombinasyonunun optimum performans aralığını vurgular.
SMLA'ların Karşılaştırılması
SMLA'lar, mühendislerin özel uygulama gereksinimlerine son derece uygun hale getirilmiş bir çözüm elde etmelerine olanak veren modüler bir hareket sistemi tasarım yaklaşımı sağlar. Üç SMLA'dan hangisinin en iyi olduğunu belirlemek, uygulamaya dayalı birçok faktöre bağlıdır.
Maksimum özelleştirme veya gerçekten benzersiz bir bileşen kombinasyonu arayanlar, döner vidalı aktüatörleri değerlendirmelidir. Döner vida tasarımları en yaygın olarak kullanılan SMLA tipidir, bu nedenle birçok mühendis bunlara oldukça aşina olacaktır.
Daha kompakt, daha basit bir aktüatörden yararlanacak ve geri tepme önleyici somun veya birçok kodlayıcı seçeneği gerektirmeyen uygulamalar, döner somun tasarımları ile daha iyi sunulabilir. Daha geleneksel, çubuk tipi bir aktüatör tasarımına geçmeyi tercih eden ve uygulamaları entegre yönlendirme, destek ve yerleşik anti-rotasyondan yararlanacak olan mühendisler, teleskopik tasarımı değerlendirmelidir. Entegre yönlendirme/destek bileşenleri harici bileşenleri satın alma ihtiyacını ortadan kaldırdığından, bu konfigürasyon toplam bileşen sayısını azaltmak önemli olduğunda da dikkate alınmaya değerdir. Tablo 1, her bir SMLA konfigürasyonunun en yaygın güçlü ve zayıf yönlerini ve ayrıca birkaç yaygın uygulama örneğini özetlemektedir.
Tasarımcıların ve entegratörlerin birçok seçeneği tamamlamalarına yardımcı olmak için SMLA üreticileri, uygulamaları için çözümleri hızlı ve kolay bir şekilde yapılandırmalarına yardımcı olacak çevrimiçi araçları giderek daha fazla sunuyor. Örneğin, performans özelliklerine, 3D modellere, fiyatlandırmaya ve teslim süresine anında erişirken, kullanıcıların uygulamaları için doğru SMLA'yı birkaç dakika içinde belirlemelerini sağlayan çevrimiçi seçim araçları vardır.
Üç ana SMLA tipinin tasarım, mekanik, kurulum ve boyutlandırma anlayışı bağlamında otomatik seçim araçlarını uygulamak, hareket tasarımcılarını ve entegratörlerini uygulamaları için en uygun seçime yönlendirmeye yardımcı olabilir.