Thomson Linear Motion Optmized


선형 구동기 - 스트로크의 끝 보호
설계 및 이론
구동기가 스트로크의 끝에 도달하면 정지해야 합니다. 그렇지 않을 경우 구동기가 과부하되고 손상될 위험이 있습니다. 스트로크의 끝에 도달했을 때 구동기를 과부하로부터 보호할 수 있는 여러 가지 방법이 있습니다.
- 클러치
- 전자식 하중 모니터링
- 리미트 스위치
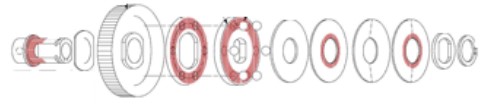
클러치
또 다른 형태의 보호는 구동기가 스트로크 엔드에 닿을 때 미끄러지는 클러치를 포함하여 구현할 수 있습니다. 간단하고 효과적입니다. 그러나 스트로크 엔드에 닿은 후에 전력이 유지되지 않도록 시스템을 설계해야 합니다. 그렇지 않으면 클러치가 빠르게 마모됩니다.
클러치
클러치
전자식 하중 모니터링
내장 마이크로프로세서가 구동기의 성능을 모니터링하고 스크로크 엔드에서 움직임을 멈춥니다.

전자식 하중 모니터링 회로
전자식 하중 모니터링 회로
리미트 스위치
리미트 스위치는 구동기의 위치가 특정 지점(리미트)에 있는 경우 모터를 정지하여 손상을 방지합니다. 리미트 스위치는 기본적으로 스트로크 엔드, 조정식 또는 프로그래밍 가능의 3가지로 분류됩니다.
- 스트로크 엔드 리미트 스위치: 구동기가 최대 및 최소 위치를 넘어서 이동하지 않도록 모터에 공급되는 전력을 차단하여 구동기 손상을 방지합니다.
- 조정식 리미트 스위치: 구동기의 최대 스트로크 내에서 제한을 설정하기 위해 구동기를 따라 다른 위치로 이동할 수 있는 리미트 스위치입니다.
- 프로그래밍 가능 리미트 스위치: 스트로크 한계를 설정하여 작동 시 스트로크를 구동기의 전체 스트로크보다 낮은 값으로 제한할 수 있습니다. 이러한 스위치는 구동기의 제어 시스템에서 프로그래밍할 수 있습니다.
