Thomson Linear Motion Optmized


Atuadores lineares - Proteção de fim de curso
Design e teoria
Quando o atuador alcança o fim do curso, ele precisa parar, caso contrário, há risco de sobrecarga e danos no próprio atuador. Existem diversas formas de proteger o atuador contra sobrecarga quando ele atinge o fim do curso, incluindo:
- Embreagem
- Monitoramento eletrônico de carga
- Interruptores de limite
Embreagem
Outra forma de proteção é simplesmente incluir uma embreagem que desliza quando o atuador atinge o final do curso. Simples e eficaz. No entanto, o sistema deve ser projetado de forma que a potência não seja mantida depois que o final do curso é atingido, caso contrário, a embreagem vai se desgastar rapidamente.
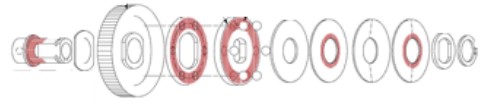
Embreagem
Embreagem
Monitoramento eletrônico de carga
Um microprocessador integrado monitora o desempenho do atuador e interrompe o movimento ao final do curso.
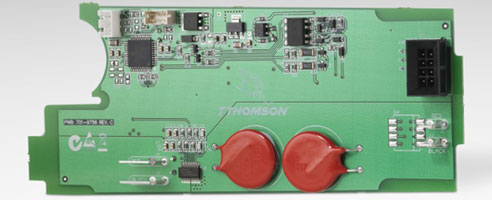
Circuito eletrônico de monitoramento de carga
Circuito eletrônico de monitoramento de carga
Interruptores de limite
Os interruptores de limite previnem o dano parando o motor quando o atuador atinge um determinado ponto (limite). Existem três classificações básicas de interruptores de limite: fim de curso, ajustável e programável.
- Interruptores de limite de fim de curso: previnem danos no atuador cortando a energia do motor a fim de impedir que o atuador se mova para além das posições máxima e mínima.
- Interruptores de limite ajustáveis: podem ser movidos para diferentes locais ao longo do atuador, a fim de definir limites que estão dentro do curso máximo do atuador.
- Interruptores de limite programáveis: é possível definir os limites de curso para limitar o curso em operação a um valor inferior ao curso total do atuador. Os interruptores podem ser programados no sistema de controle do atuador.
