Thomson Linear Motion Optmized


Siłowniki liniowe - Ochrona na końcu skoku
Budowa i teoria
Gdy siłownik osiąga koniec skoku, musi zatrzymać się lub ryzykuje przeciążeniem i uszkodzeniem. Istnieje wiele sposobów ochrony siłownika przed przeciążeniem na końcu skoku obejmujących:
- Sprzęgło
- Elektroniczne monitorowanie obciążenia
- Wyłączniki krańcowe
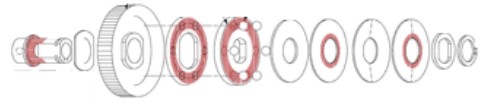
Sprzęgło
Inna forma zabezpieczenia może obejmować proste użycie sprzęgła, które ślizga się, gdy siłownik osiąga koniec skoku. Jest prosta i skuteczna. Jednak układ musi być zaprojektowany tak, aby napęd nie był podtrzymywany po zakończeniu skoku, gdyż dojdzie do szybkiego zużycia sprzęgła.
Sprzęgło
Sprzęgło
Elektroniczne monitorowanie obciążenia
Wbudowany mikroprocesor monitoruje wydajność siłownika i zatrzymuje ruch na końcu skoku.
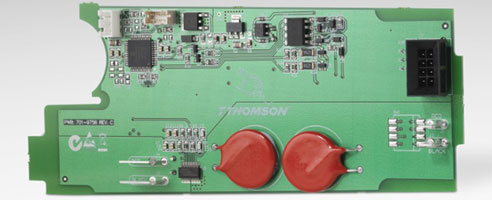
Obwód elektronicznego monitorowania obciążenia
Obwód elektronicznego monitorowania obciążenia
Wyłączniki krańcowe
Wyłączniki krańcowe zapobiegają uszkodzeniom, zatrzymując silnik, gdy położenie siłownika osiągnie określony punkt (kraniec). Istnieją trzy główne grupy wyłączników krańcowych: końca skoku, regulowane i programowalne.
- Wyłączniki krańcowe końca skoku: zapobiegają uszkodzeniu siłownika, odcinając zasilanie silnika, aby uniemożliwić ruch siłownika poza położenie maksymalne i minimalne.
- Regulowane wyłączniki krańcowe: wyłączniki, które można przesuwać do innych położeń wzdłuż siłownika w celu ustawienia położeń granicznych w zakresie maksymalnego skoku siłownika.
- Programowalne wyłączniki krańcowe: granice skoku mogą być ustawiane, aby ograniczyć skok podczas pracy do wartości mniejszej niż pełny skok siłownika. Mogą być programowane w układzie sterowania siłownika.
