Thomson Linear Motion Optmized


Linear Actuators - Mid-Stroke Protection
Design and Theory
In the event that an actuator is accidentally overloaded while it is mid stroke the actuator has some mid stroke protection. There are two main types of mid-stroke protection.
- Clutch
- Electronic load monitoring
Clutch
When utilizing a clutch for protection, a ball detent clutch is usually
the choice. In this style of clutch, a spring force presses the balls
into their detents. When the torque to rotate the shaft becomes too
high, the balls force themselves out of their detents against the spring
pressure. This allows the motor to turn without the shaft or screw
turning, which keeps the actuator from extending. As the clutch
continues to rotate, the balls will fall into the next set of detents.
If this continues, a ratcheting or clicking sound is heard. This should
not be allowed to continue as the clutch will quickly wear.
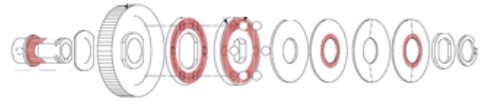
ball detent clutch exploded view
ball detent clutch exploded view
Electronic load monitoring
In electronic monitoring, a built-in microprocessor monitors the current
draw of the motor. If the current draw exceeds the amount required for
the load rating for the actuator, the microprocessor will stop the
movement of the actuator by cutting power to the motor.

Electronic load monitoring circuitry
Electronic load monitoring circuitry

Video discussing ways the actuator is protected from overload throughout its stroke.
