Thomson Linear Motion Optmized


Stepper Motor Linear Actuators - Driving
Product Details
Motion of a Stepper Motor Linear Actuators (SMLA) is achieved by supplying controlled, electrical pulses to the internal stepper motor coils. Energizing these coils in specific time sequences enables the programmer to manipulate the rotation of the motor shaft and induce motion.
A PDF document of this content is available for download using this (link)
The most basic open loop system setup for driving a SMLA can consist of the following components:
- Programmable logic controller (PLC), personal computer (PC) or micro-controller
- Motion controller
- Stepper motor drive

Basic open loop setup
Basic open loop setup
PLC, PC or Microcontroller
A PLC, PC or micro-controller can be considered the brains, or central processing unit (CPU), of the entire system. This is where the main program will be stored, acting as the primary interface between the user and the system as well as the central unit to interface with all other peripherals and sensors in the system. A PLC, PC or micro-controller would also provide supervisory control and coordination between multiple SMLAs and peripherals/sensors in the system if needed. Although functionality is generally the same between PLCs, PCs and micro-controllers, slight differences exist:
Programmable Logic Controller (PLC)
A PLC is a barebones computer with no keyboard, monitor or mouse attached to it. It is a purpose-built computer for industrial applications where it may be exposed to harmful conditions (dirt, debris, shock, etc.). A PLC is usually programmed via a computer running a proprietary software provided by the manufacturer, so an experienced programmer may not be required.
Personal Computer (PC)
In some cases, a standard computer can be used as the CPU for a SMLA system. With the right interface cards and/or ports, a PC can be directly connected to a motion controller and/or driver. Oftentimes, motion controllers and drives can also come with proprietary software, allowing them to be run without a PLC. If a motion programming software is not included with the motion controller or stepper drive, an experienced programmer will be required to properly interface and run the SMLA system.
Micro-controllers
Micro-controllers are similar to PLCs but are much more stripped down (no enclosure, no proprietary software, etc.). Micro-controllers are meant to be incorporated into a greater electrical system or circuit board. Although it would be considered much more “ground up” to utilize a micro controller, there is much more freedom with regards to programming and electrical integration into a greater system as well as an overall lower cost over PLCs and PCs. Since micro-controllers are more minimal than PLCs, an experienced programmer is often required to build the software from the ground up.
Motion Controller
In some cases, the signal being sent out from the PLC, PC or micro-controller is inadequate for the stepper drive to utilize. In these cases, a motion controller is required to take the instructions from the PLC, PC or micro-controller and convert it to something that can be employed to the stepper motor drive.Simple signals can be sent to the motion controller that can manipulate the step position, speed and torque of the SMLA. A motion controller can often be called a “pulse generator” due to it communicating with the stepper drive by sending out electrical pulses at different amplitudes and frequencies.A lot of newer stepper drives have a controller directly integrated into them. This eliminates the need for an external controller and allows for the signal from the PLC, PC or micro-controller to be directly utilized. A basic system illustrating a combination controller and drive is shown below.

setup utilizing a combined motion controller and stepper drive
setup utilizing a combined motion controller and stepper drive
Stepper Drive
The stepper motor drive is the link between the controller and the stepper motor on the SMLA. This unit can be considered a translator between the controller and stepper motor. The signals from the controller are interpreted by the driver and converted/amplified to a usable current into the motor. It provides the necessary power to drive the stepper motor. Maximum current and micro-stepping resolution are often configured on the driver in the form of DIP switches directly on the unit.
Closed Loop Systems
In some situations, feedback from the SMLA is required within a system. Feedback can give you an instantaneous position of the SMLA unit by interpreting the signal coming from the encoder attached directly to the motor. A compatible PLC/PC/micro-controller, driver and/or motion controller can read this signal from the encoder and make necessary adjustments and corrections to the motion of the SMLA if necessary. Two potential SMLA feedback systems are illustrated in Figures below.
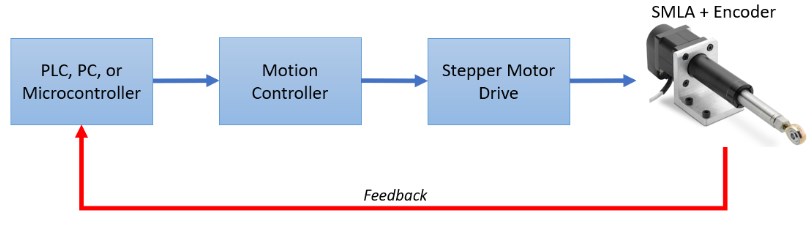
basic closed loop SMLA system
basic closed loop SMLA system
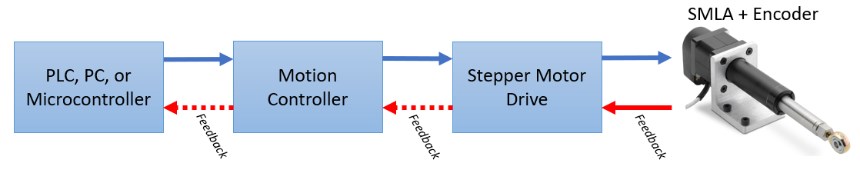
Feedback going directly to the motor drive
Feedback going directly to the motor drive
A PDF document of this content is available for download using this (link)
