Thomson Linear Motion Optmized


Actionneurs linéaires à moteur pas à pas - Entraînement
Détails du produit
Le mouvement d’un vérin linéaire à moteur pas à pas (SMLA) est obtenu en fournissant des impulsions électriques contrôlées aux bobines internes du moteur pas à pas. L’activation de ces bobines selon des séquences temporelles spécifiques permet au programmateur de manipuler la rotation de l’arbre du moteur et d’induire un mouvement.
Un document PDF de ce contenu est disponible au téléchargement en utilisant ce (lien)
La configuration la plus élémentaire d’un système en boucle ouverte pour l’entraînement d’un SMLA peut se composer des éléments suivants :
- Automate programmable (API), ordinateur (PC) ou micro-contrôleur
- Contrôleur de mouvement
- Entraînement à moteur pas à pas

Configuration de base en boucle ouverte
Configuration de base en boucle ouverte
API, PC ou micro-contrôleur
Un API, PC ou micro-contrôleur peut être considéré comme le cerveau, ou le processeur (CPU), de l’ensemble du système. C’est là que le programme principal sera stocké, servant d’interface principale entre l’utilisateur et le système ainsi que d’unité centrale pour l’interface avec tous les autres périphériques et capteurs du système. Un API, un PC ou un micro-contrôleur assure également le contrôle et la coordination entre plusieurs SMLA et les périphériques/capteurs du système si nécessaire. Bien que les fonctionnalités soient généralement les mêmes entre les API, les PC et les micro-contrôleurs, il existe de légères différences :
Automate programmable (API)
Un API est un ordinateur sans clavier, moniteur ou souris. Il s’agit d’un ordinateur spécialement conçu pour des applications industrielles où il peut être exposé à des conditions nocives (saleté, débris, chocs, etc.). Un API est généralement programmé via un ordinateur utilisant un logiciel propriétaire fourni par le fabricant, de sorte qu’un programmeur expérimenté peut ne pas être nécessaire.
Ordinateur (PC)
Dans certains cas, un ordinateur standard peut être utilisé comme CPU pour un système SMLA. Avec les cartes d’interface et/ou les ports appropriés, un PC peut être directement connecté à un contrôleur de mouvement et/ou à un entraînement. Souvent, les contrôleurs de mouvement et les entraînements peuvent également être livrés avec un logiciel propriétaire, ce qui leur permet de fonctionner sans API. Si un logiciel de programmation de mouvement n’est pas inclus avec le contrôleur de mouvement ou l’entraînement pas à pas, un programmeur expérimenté sera nécessaire pour interfacer et faire fonctionner correctement le système SMLA.
Micro-contrôleurs
Les micro-contrôleurs sont similaires aux API mais sont beaucoup plus dépouillés (pas de boîtier, pas de logiciel propriétaire, etc.). Les micro-contrôleurs sont destinés à être incorporés dans un système électrique ou un circuit imprimé plus important. Bien que l’utilisation d’un micro-contrôleur soit considérée comme beaucoup plus « basique », il y a beaucoup plus de liberté en ce qui concerne la programmation et l’intégration électrique dans un système plus grand, ainsi qu’un coût global inférieur à celui des API et des PC. Les micro-contrôleurs étant plus minimaux que les API, un programmeur expérimenté est souvent nécessaire pour construire le logiciel à partir de la base.
Contrôleur de mouvement
Dans certains cas, le signal envoyé par l’APIle PC ou le micro-contrôleur est insuffisant pour que l’entraînement pas à pas puisse être utilisé. Dans ce cas, un contrôleur de mouvement est nécessaire pour prendre les instructions de l’API, du PC ou du micro-contrôleur et les convertir en quelque chose qui peut être utilisé pour l’entraînement du moteur pas à pas. Des signaux simples peuvent être envoyés au contrôleur de mouvement qui peut manipuler la position des pas, la vitesse et le couple du SMLA. Un contrôleur de mouvement peut souvent être appelé « générateur d’impulsions » car il communique avec l’entraînement pas à pas en envoyant des impulsions électriques à différentes amplitudes et fréquences. Cela élimine la nécessité d’un contrôleur externe et permet d’utiliser directement le signal de l’API, du PC ou du micro-contrôleur. Un système de base illustrant un contrôleur et un entraînement combinés est présenté ci-dessous.

configuration utilisant un contrôleur de mouvement et un entraînement pas à pas combinés
configuration utilisant un contrôleur de mouvement et un entraînement pas à pas combinés
Entraînement pas à pas
L’entraînement à moteur pas à pas est le lien entre le contrôleur et le moteur pas à pas sur le SMLA. Cette unité peut être considérée comme un traducteur entre le contrôleur et le moteur pas à pas. Les signaux du contrôleur sont interprétés par le conducteur et convertis/amplifiés en un courant utilisable dans le moteur. Il fournit la puissance nécessaire pour entraîner le moteur pas à pas. Le courant maximum et la résolution des micro-pas sont souvent configurés sur l’entraînement sous forme de commutateurs DIP directement sur l’appareil.
Systèmes en boucle fermée
Dans certaines situations, une rétroaction de la part du SMLA est nécessaire au sein d’un système. La rétroaction peut vous donner une position instantanée de l’unité SMLA en interprétant le signal provenant du codeur fixé directement au moteur. Un API/PC/micro-contrôleur, pilote et/ou contrôleur de mouvement compatible peut lire ce signal à partir du codeur et apporter les ajustements et corrections nécessaires au mouvement du SMLA si nécessaire. Les figures ci-dessous illustrent deux systèmes de rétroaction potentiels du SMLA.
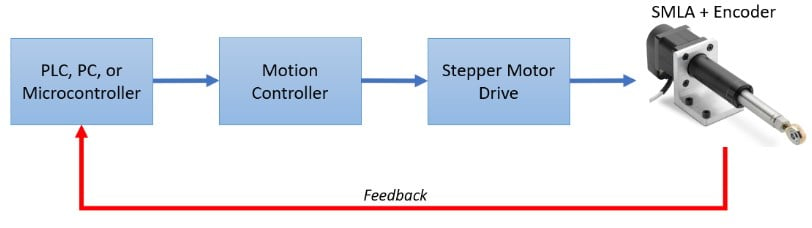
système SMLA de base en boucle fermée
système SMLA de base en boucle fermée
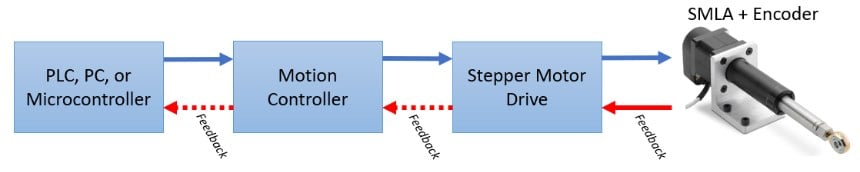
La rétroaction va directement à l’entraînement du moteur
La rétroaction va directement à l’entraînement du moteur
Un document PDF de ce contenu est disponible au téléchargement en utilisant ce (lien)
