Thomson Linear Motion Optmized


Actionneurs linéaires à moteur pas à pas - Sélection
Détails du produit
Lors de la sélection des composants pour la construction d’un nouveau système SMLA, l’expérience est en fin de compte le meilleur outil à disposition. Les concepteurs de systèmes ont de nombreuses préférences en ce qui concerne les API, les contrôleurs de mouvement, les entraînements, etc. et il n’existe pas de configuration unique correcte. Toutefois, il existe quelques lignes directrices générales qui peuvent être utilisées et qui sont décrites dans les sections suivantes.
Sélection SMLA
Pour choisir le SMLA approprié à vos besoins, il faut tenir compte de nombreux facteurs tels que la charge et la vitesse, le courant et la tension d’entraînement disponibles, la configuration préférée (MLS, MLN ou MLA), etc. Selon les exigences du système, le moteur du SMLA peut être programmé à la vitesse souhaitée, à l’accélération et au profil général de mouvement requis. La principale considération est que la taille appropriée du moteur est choisie en fonction des exigences de charge et de vitesse souhaitées. Les courbes de performances du moteur individuel se trouvent dans la brochure du SMLA et doivent être examinées. En règle générale, une marge d’au moins 50 % est recommandée pour le dimensionnement d’un moteur. Pour un dimensionnement critique et/ou détaillé, discutez de vos besoins avec un ingénieur Thomson
Sélection API, PC ou micro-contrôleur
La sélection d’un CPU est entièrement laissée à l’appréciation du concepteur du système. Souvent, un API, un PC ou un micro-contrôleur existant dans votre système peuvent être utilisés. Si vous partez de zéro, vous pouvez vous poser les questions suivantes : le CPU sera-t-il exposé à des conditions industrielles difficiles où un API pourrait être bénéfique ? Vais-je écrire mon propre logiciel alors que l’utilisation d’un PC faciliterait les choses ? Ou l’intégration de ce CPU sur une carte de circuit imprimé et un micro-contrôleur à petite échelle serait-elle la plus logique ?
Sélection contrôleur de mouvement et entraînement
Contrôleur de mouvement
La première chose à vérifier lors de la sélection d’un contrôleur de mouvement est la compatibilité avec d’autres composants du système tels que l’API/PC, le moteur pas à pas et les sources de tension. La vitesse du moteur est contrôlée par la fréquence des impulsions (impulsions par seconde) fournies par l’entraînement via le contrôleur. En fonction de la vitesse requise, il faut s’assurer que le contrôleur de mouvement peut émettre la fréquence d’impulsion correspondante pour atteindre cette vitesse. Le contrôleur de mouvement doit être capable d’émettre cette fréquence d’impulsion, et le moteur pas à pas doit être capable de recevoir cette fréquence d’impulsion et de l’envoyer au SMLA. L’équation permettant de déterminer la fréquence d’impulsion requise est présentée ci-dessous.

- Vitesse linéaire : vitesse de déplacement linéaire souhaitée (po/s)
- Pas hélicoïdal : course de la vis-mère par tour complet de la vis (po/tr)
- Pas du moteur par tour : combien de pas par tour complet du moteur (pas/tr). Tous les SMLA sont de 200 pas par tour.
- Impulsions par pas : impulsions par pas (impulsion/pas). Les SMLA sont de 1 impulsion par pas.
- Micropas : résolution des micro-pas (micro-pas/pas)
- Vitesse linéaire : vitesse de déplacement linéaire souhaitée (po/s)
- Pas hélicoïdal : course de la vis-mère par tour complet de la vis (po/tr)
- Pas du moteur par tour : combien de pas par tour complet du moteur (pas/tr). Tous les SMLA sont de 200 pas par tour.
- Impulsions par pas : impulsions par pas (impulsion/pas). Les SMLA sont de 1 impulsion par pas.
- Micropas : résolution des micro-pas (micro-pas/pas)
Entraînement pas à pas
Comme pour un contrôleur, l’utilisateur doit choisir un entraînement en fonction de sa capacité à s’interfacer avec tous les autres composants du système - en particulier le moteur pas à pas et le contrôleur. Pour les moteurs pas à pas SMLA standard de Thomson, un entraînement doit pouvoir permettre la connexion d’un moteur bipolaire à quatre fils. Les propriétés électriques du système doivent également être prises en considération. Des éléments tels que le courant de sortie souhaité vers le moteur, la tension d’entrée maximale de l’alimentation électrique et l’inductance du moteur devront être examinés. Tout comme pour un contrôleur, il faudra également tenir compte de la fréquence d’impulsion requise pour s’assurer que le conducteur est capable de conduire le moteur à la vitesse requise.
Micro-pas
Il existe de nombreuses commandes de moteurs pas à pas uniques qui offrent différentes résolutions de micro-pas. En fonction de vos besoins, il peut être utile d’envisager des micro-pas, notamment si un mouvement fluide est nécessaire. Le micro-pas utilise essentiellement les 200 pas standard par tour du moteur SMLA et décompose chaque pas en de plus petits incréments tels que le pas ½, le pas ¼ et même jusqu’au 1/256e de pas. La figure ci-dessous illustre la différence entre le pas complet et le micro-pas.
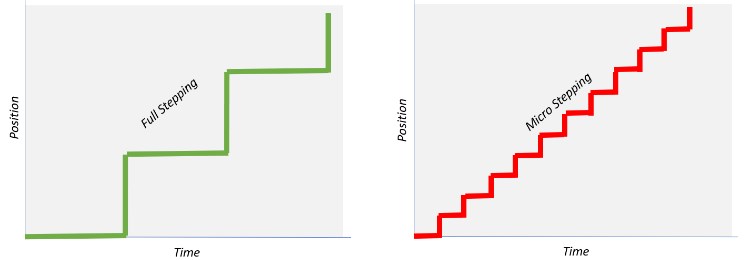
comparaison du mouvement entre le pas complet et le micro-pas
Une chose importante à noter à propos du micro-pas est qu’il n’améliore pas la précision de la position en allant vers des résolutions plus fines. La précision de rotation typique d’un moteur pas à pas est d’environ +/- 0,09 degré, quelle que soit la résolution du micro-pas.
comparaison du mouvement entre le pas complet et le micro-pas
Une chose importante à noter à propos du micro-pas est qu’il n’améliore pas la précision de la position en allant vers des résolutions plus fines. La précision de rotation typique d’un moteur pas à pas est d’environ +/- 0,09 degré, quelle que soit la résolution du micro-pas.
Considérations finales
Les conseils fournis ci-dessus doivent être utilisés comme un moyen de se mettre à niveau pour la construction d’un système. Il peut être nécessaire de procéder à des tentatives et des erreurs pour obtenir un système totalement fonctionnel. Utilisez toujours l’aide d’un concepteur de système expérimenté et ajoutez une marge décente aux calculs du système lorsque c’est possible. Thomson peut vous aider à recommander un produit SMLA pour obtenir les performances dont vous avez besoin. Les fabricants d’API, de contrôleurs de mouvement et d’entraînements disposeront également d’ingénieurs spécialisés pour vous aider à choisir l’un de leurs produits.
