Thomson Linear Motion Optmized


Kademeli Motorlu Lineer Aktüatörler - Seçim
Ürün Ayrıntıları
Yeni SMLA sistemi kurulumu için bileşen seçerken, deneyim kişinin elinin altında en iyi araçtır. PLC'ler, hareket kontrol birimleri, tahrikler, vs. söz konusu olduğunda sistem tasarımcılarının çok sayıda tercihi vardır ve tek bir doğru kurulum yoktur. Bununla birlikte, kullanılabilecek bazı genel kurallar vardır. Bunlar aşağıdaki bölümlerde açıklanmıştır.
SMLA Seçimi
İhtiyaçlarınız için uygun SMLA seçerken, yük ve hız, mevcut tahrik akımı ve gerilimi, tercih edilen konfigürasyon (MLS, MLN veya MLA) ve bunlar gibi değerlendirilmesi gereken birçok faktör vardır. Sistem gerekliliklerine bağlı olarak, SMLA içindeki motor istenen hız, ivme ve genel hareket profiline programlanabilir. Asıl dikkat edilmesi gereken nokta, istenen yük ve hız gereklilikleri için uygun motor boyutunun seçilmesidir. Motor performans grafikleri SMLA broşüründe yer almaktadır ve incelenmelidir. Tipik olarak, motor boyutlandırılırken en az %50 boşluk önerilir. Kritik ve/veya detaylı boyutlandırma için, ihtiyaçlarınız hakkında Thomson mühendisiyle görüşün
PLC, PC veya Mikro kontrol birimi Seçimi
CPU seçimi tamamen sistem tasarımcısına bağlıdır. Çoğu zaman, sisteminizde mevcut olan PLC, PC veya mikro kontrol birimi kullanılabilir. Sıfırdan başlanacağı zaman, kendinize aşağıdaki soruları kendinize sorabilirsiniz: Acaba CPU, PLC'nin avantajlı olabileceği zorlu endüstriyel koşullara maruz kalır mı? Bir PC'nin işleri kolaylaştıracağı durumda kendi yazılımımı mı yazmalıyım? Bu CPU'yu devre panosuna entegre etmeli miyim veya küçük ölçekli bir mikro kontrol birimi daha mı mantıklı olur?
Hareket Kontrol Birimi ve Sürücü Seçimi
Hareket Kontrol Birimi
Bir hareket kontrol birimi seçerken kontrol edilmesi gereken ilk şey, PLC/PC, step sürücüsü ve voltaj kaynakları ile uyumluluğudur. Motor hızı, kontrol birimi üzerinden sürücü ile sağlanan darbe oranı tarafından kontrol edilir. Gereken hıza göre, hareket kontrol biriminin bu hıza ulaşmak için karşılık gelen darbe oranına çıkış sağladığından emin olunmalıdır. Hareket kontrol birimi bu darbe oranına çıkış sağlamalıdır ve step sürücüsü de bu darbe oranını alıp SMLA'ya göndermelidir. Darbe oranını belirlemek için gereken denklem aşağıda gösterilmiştir.

- Lineer hız: istenilen lineer hareket hızı (inç/s)
- Kılavuz: vidanın her tam devrindeki kılavuz vida hareketi (inç/devir)
- Devir başına motor adımları: motorun bir tam devrindeki adım sayısı (adım/devir). Tüm SMLA'lar devir başına 200 adımlıdır.
- Adım başına darbe: adım başına darbe (darbe/adım). SMLA'lar 1 adım başına 1 darbelidir.
- Mikro step: Mikro step işlemi çözümü (mikro step/step)
- Lineer hız: istenilen lineer hareket hızı (inç/s)
- Kılavuz: vidanın her tam devrindeki kılavuz vida hareketi (inç/devir)
- Devir başına motor adımları: motorun bir tam devrindeki adım sayısı (adım/devir). Tüm SMLA'lar devir başına 200 adımlıdır.
- Adım başına darbe: adım başına darbe (darbe/adım). SMLA'lar 1 adım başına 1 darbelidir.
- Mikro step: Mikro step işlemi çözümü (mikro step/step)
Step Sürücüsü
Bir kontrol birimi gibi, kullanıcı sistemdeki diğer tüm bileşenler – özellikle de step motoru ve kontrol birimi ile arayüz bağlantılarını kurma özelliklerine göre bir sürücü seçmelidir. Thomson standart SMLA step motorları için, bir sürücü dört kablonun, çift kutuplu motorun bağlantılarını yapabilmelidir. Ayrıca sistemin elektrik özellikleri de göz önünde bulundurulmalıdır. Motora giden istenilen çıkış akımı, güç kaynağından gelen maks. giriş voltajı ve motor indüktansı gözden geçirilmelidir. Sadece bir kontrol birimi gibi, sürücünün motoru gereken hızda çalıştırabileceğinden emin olmak gereklidir.
Micro-step işlemi
Çeşitli mikro step işlemi çözümleri sunan birçok kendine has step motor sürücüleri de mevcuttur. İhtiyacınıza bağlı olarak, özellikle pürüzsüz bir hareket gerekliyse mikro step işlemi değerlendirilebilir. Mikro step işlemi, SMLA motorunun her bir devri başına standart olarak 200 adımdaki her bir adımı ½ adım, ¼ adımdan 1/256 adıma kadar küçük adımlara böler. aşağıdaki şekil tam step ve mikro step işlemi arasındaki farkları gösterir.
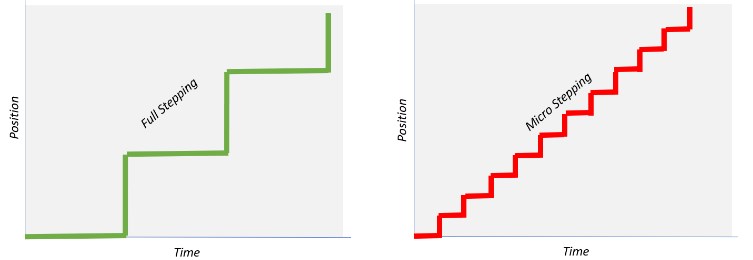
tam step ve mikro step işlemi arasındaki hareketi kıyaslamak
Mikro step işlemi hakkında aklınızda bulundurmanız gereken önemli bir konu da, daha iyi çözümler denemek konumsal doğruluğu iyileştirmez. Bir step motoru için tipik dönüş doğruluğu mikro step işlemi çözümüne bağlı olmadan yaklaşık +/- 0,09 değerindedir.
tam step ve mikro step işlemi arasındaki hareketi kıyaslamak
Mikro step işlemi hakkında aklınızda bulundurmanız gereken önemli bir konu da, daha iyi çözümler denemek konumsal doğruluğu iyileştirmez. Bir step motoru için tipik dönüş doğruluğu mikro step işlemi çözümüne bağlı olmadan yaklaşık +/- 0,09 değerindedir.
Son Değerlendirmeler
Yukarıda verilen bilgiler sistem kurulumu için benzer özelliklerin elde edilmesi amacıyla kullanılmalıdır. Tamamen çalışan bir sistem elde etmek için deneme yanılma yöntemiyle bazı denemelerin yapılması gerekebilir. Her zaman tecrübeli bir sistem tasarımcısının yardımını alın ve mümkün olduğunda sistem hesaplamaları için uygun bir bütçe ayırın. Thomson, ihtiyacınız olan performansı elde etmeniz için SMLA önerilerinde bulunarak yardımcı olur. PLC, hareket kontrol birimi ve sürücü üreticileri de ürünlerini seçmeniz konusunda size yardımcı olacak mühendisler sağlamaktadır.
