Thomson Linear Motion Optmized


Atuadores lineares de motor de passo - Seleção
Detalhes do produto
Após a seleção de componentes para a criação de um novo sistema SMLA, a experiência final é a melhor ferramenta disponível no mercado. Quando se trata de PLCs, controladores de movimento, acionamentos etc., os designers de sistemas podem escolher diversas preferências, e várias configurações são corretas e possíveis. No entanto, existem algumas diretrizes gerais que são descritas nas seções seguintes.
Seleção do SMLA
No momento da seleção do SMLA adequado para suas necessidades, há diversos fatores a serem levados em conta, como carga e velocidade, corrente e tensão de acionamento disponíveis, configurações preferidas (MLS, MLN ou MLA) e assim por diante. Dependendo dos requisitos do sistema, o motor no sistema SMLA pode ser programado de acordo com a velocidade e aceleração desejadas e o perfil geral de movimento necessário. A principal consideração é a seleção do tamanho apropriado para o motor, de acordo com os requisitos de carga e velocidade. Recomendamos o estudo dos gráficos individuais de desempenho do motor que são apresentados no folheto do sistema SMLA. Geralmente, para o dimensionamento de um motor, é recomendada uma margem de pelo menos 50%. Se você precisar de dimensionamento detalhado e/ou crítico, converse sobre suas necessidades com um engenheiro da Thomson
Seleção de PLC, PC ou microcontrolador
A seleção de uma CPU depende totalmente das preferências do designer do sistema. Muitas vezes, é possível usar um PLC, um PC ou um microcontrolador existente em seu sistema. Se você estiver começando do zero, faça a si mesmo as seguintes perguntas: a CPU será exposta a condições industriais extremas nas quais um PLC pode ser útil? Caso usar apenas um PC fosse mais fácil, eu iria querer criar meu próprio software? Faria mais sentido integrar essa CPU em uma placa de circuitos e em um microcontrolador de pequena escala?
Seleção do controlador de movimento e do driver
Controlador de movimento
A primeira questão que deve ser verificada na seleção de um controlador de movimento é a compatibilidade com outros componentes do sistema, como PLC/PC, driver do motor de passo e fontes de tensão. A velocidade do motor é controlada pela taxa de pulso (pulsos por segundo) fornecida pelo driver via controlador. Dependendo da velocidade necessária, é necessário garantir que o controlador de movimento tenha capacidade para gerar a taxa de pulso correspondente para atingir essa velocidade. O controlador de movimento deve ser capaz de gerar essa taxa de pulso, e o motor de passo deve ser capaz de receber essa taxa de pulso e transferi-la para o SMLA. Veja abaixo a equação para determinar a taxa de pulso necessária.

- Velocidade linear: velocidade de deslocamento linear desejada (pol/s)
- Avanço: deslocamento do parafuso de avanço por rotação completa do parafuso (pol/s)
- Passos do motor por rotação: quantos passos por rotação completa do motor (passos/rotação). Todos os SMLAs fazem 200 passos por rotação.
- Pulsos por passo: pulsos por passo (pulso/passo). SMLAs fazem 1 pulso a cada passo.
- Micropasso: resolução de micropasso (micropasso/passo)
- Velocidade linear: velocidade de deslocamento linear desejada (pol/s)
- Avanço: deslocamento do parafuso de avanço por rotação completa do parafuso (pol/s)
- Passos do motor por rotação: quantos passos por rotação completa do motor (passos/rotação). Todos os SMLAs fazem 200 passos por rotação.
- Pulsos por passo: pulsos por passo (pulso/passo). SMLAs fazem 1 pulso a cada passo.
- Micropasso: resolução de micropasso (micropasso/passo)
Acionador do motor de passo
Assim como ocorre no caso do controlador, o usuário deve selecionar um acionador de acordo com a capacidade de fazer a interface com todos os outros componentes no sistema, especificamente o motor de passo e o controlador. No caso dos motores de passo SMLA padrão da Thomson, o acionador deve permitir a conexão de um motor bipolar de quatro fios. As propriedades elétricas do sistema também devem ser levadas em conta. É necessário avaliar itens como a corrente de saída desejada para o motor, a tensão máxima de entrada gerada pela fonte de alimentação e a indutância do motor. Assim como ocorre para um controlador, a taxa de pulso necessária também deve ser considerada para garantir que o driver seja capaz de acionar o motor na velocidade necessária.
Micropasso
Muitos acionadores de motor de passo exclusivos oferecem variadas resoluções de micropasso. Dependendo da sua necessidade, pode valer a pena considerar a opção de micropasso, especialmente se a aplicação exigir movimento suave. Essencialmente, o micropasso adota o padrão de 200 passos por rotação do motor SMLA e divide cada passo em incrementos menores, como ½ passo, ¼ de passo e até mesmo 1/256 de passo. A figura abaixo ilustra a diferença entre passo total e micropasso.
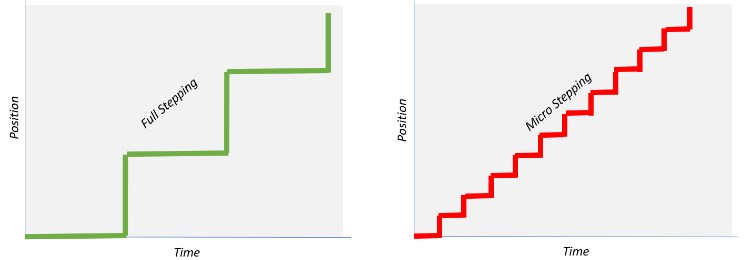
comparação do movimento entre passo total e micropasso
Um detalhe importante do micropasso é que ele não aumenta a precisão posicional por atingir resoluções mais finas. O motor de passo tem uma precisão rotacional típica de aproximadamente +/- 0,09 grau, independentemente da resolução de micropasso.
comparação do movimento entre passo total e micropasso
Um detalhe importante do micropasso é que ele não aumenta a precisão posicional por atingir resoluções mais finas. O motor de passo tem uma precisão rotacional típica de aproximadamente +/- 0,09 grau, independentemente da resolução de micropasso.
Considerações finais
A orientação acima deve ser considerada uma forma de obter estimativas para a criação de um sistema. Podem ser necessários alguns experimentos de tentativa e erro para a obtenção de um sistema totalmente funcional. Sempre conte com a ajuda de um designer de sistemas experiente e, quando possível, acrescente uma razoável margem aos cálculos do sistema. A Thomson pode recomendar o produto SMLA certo para você obter o desempenho de que precisa. Fabricantes de PLC, controladores de movimento e acionadores também disponibilizam engenheiros dedicados a auxiliar você na seleção dos produtos.
