Thomson Linear Motion Optmized


Actuadores lineales de motores paso a paso - Selección
Detalles de productos
A la hora de seleccionar componentes para construir un nuevo sistema SMLA, la experiencia es, en última instancia, la mejor herramienta disponible. Cada diseñador de sistemas tiene sus propias preferencias en relación con el uso de PLC, controladores de movimiento, accionamientos, etc., y no existe una única configuración válida. Sin embargo, en las secciones siguientes se presentan algunos lineamientos generales.
Selección de SMLA
A la hora de seleccionar el SMLA adecuado para su aplicación, hay muchos factores que debe tener en cuenta, como la carga y la velocidad, la corriente y la tensión del accionamiento, la configuración deseada (MLS, MLN o MLA), etc. En función de los requisitos del sistema, el motor del SMLA se puede programar para que opere con la velocidad y la aceleración deseadas o, en general, con el perfil de movimiento que se requiera. La principal consideración es seleccionar el motor adecuado para la carga prevista y la velocidad necesaria. En el folleto de los SMLA hay gráficas de rendimiento de cada motor que debería analizar con atención. En general, se recomienda un margen de seguridad de al menos el 50 % a la hora de dimensionar un motor. Para un dimensionamiento más detallado o si se trata de un dimensionamiento crítico, póngase en contacto con un ingeniero de Thomson para discutir sus requerimientos.
Selección de un PLC, una PC o un microcontrolador
La selección de una CPU depende enteramente del diseñador del sistema. A menudo, es posible usar un PLC, una PC o un microcontrolador que ya formen parte del sistema. Si comienza desde cero, puede hacerse las siguientes preguntas: “¿La CPU estará expuesta a un entorno industrial exigente en el que podría ser más adecuado un PLC?”. “¿Tendré que escribir mi propio software, para lo cual podría ser útil una PC?”. “¿O tendría más sentido usar una placa de circuito pequeña con un microcontrolador?”.
Selección de un controlador de movimiento y un accionamiento.
Controlador de movimiento
Lo primero que se debe comprobar a la hora de seleccionar un controlador de movimiento es la compatibilidad con otros componentes del sistema, como el PLC o la PC, el accionamiento del motor paso a paso y las fuentes de alimentación. La velocidad del motor se controla mediante la frecuencia de los pulsos (pulsos por segundo) que el controlador envía al accionamiento. En función de la velocidad necesaria, hay que asegurar que el controlador de movimiento pueda generar pulsos con una frecuencia suficientemente alta para alcanzar esa velocidad. El controlador de movimiento debe ser capaz de generar pulsos a esta frecuencia y el accionamiento del motor paso a paso debe ser capaz de recibir pulsos a esta frecuencia y enviarlos al SMLA. La ecuación para calcular la frecuencia de pulsos necesarios es la siguiente.

- Velocidad lineal: velocidad de desplazamiento lineal deseada (in/s)
- Avance: el desplazamiento lineal producido por una vuelta completa del husillo (in/rev)
- Pasos del motor por revolución: cuántos pasos hay en una vuelta completa del motor (pasos/rev). Todos los SMLA tienen 200 pasos por revolución.
- Pulsos por paso: la cantidad de pulsos por paso (pulsos/paso). Los SMLA usan 1 pulso por paso.
- Micropasos: resolución de los micropasos (micropasos/paso)
- Velocidad lineal: velocidad de desplazamiento lineal deseada (in/s)
- Avance: el desplazamiento lineal producido por una vuelta completa del husillo (in/rev)
- Pasos del motor por revolución: cuántos pasos hay en una vuelta completa del motor (pasos/rev). Todos los SMLA tienen 200 pasos por revolución.
- Pulsos por paso: la cantidad de pulsos por paso (pulsos/paso). Los SMLA usan 1 pulso por paso.
- Micropasos: resolución de los micropasos (micropasos/paso)
Accionamiento del motor paso a paso
Al igual que un controlador, el accionamiento se debe seleccionar en función de su capacidad para interactuar con otros componentes del sistema, en particular el motor paso a paso y el controlador. En el caso de los motores paso a paso estándar de los SMLA de Thomson, el accionamiento debe ser compatible con un motor bipolar de cuatro terminales. También se deben tener en cuenta las propiedades eléctricas del sistema. Se deben evaluar cuestiones como la corriente suministrada al motor, la tensión máxima de entrada de la fuente de alimentación y la inductancia del motor. Al igual que en el caso de un controlador, también se debe tener en cuenta la frecuencia de pulsos necesaria, para asegurarse de que el accionamiento pueda mover el motor a la velocidad necesaria.
Micropasos
Muchos accionamientos de motores paso a paso ofrecen distintas resoluciones de micropasos. Según los requisitos de su aplicación, los micropasos podrían ser una buena opción, especialmente si se requiere un movimiento suave. Básicamente, la técnica de micropasos consiste en tomar los 200 pasos por revolución habituales del motor de un SMLA y dividir cada caso en incrementos menores, como ½ paso, ¼ paso y así sucesivamente hasta apenas 1/256 paso. La siguiente figura muestra la diferencia entre los pasos normales y los micropasos.
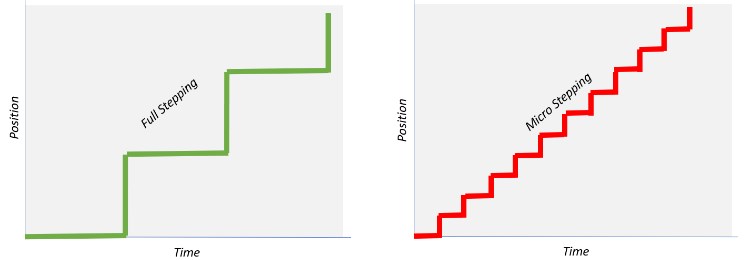
Comparación entre el movimiento con pasos completos y micropasos
Un aspecto importante acerca de los micropasos es que usar resoluciones más finas no mejora la precisión posicional. La precisión rotativa promedio de un motor paso a paso es de aproximadamente +/-0,09 grados independientemente de la resolución de los micropasos.
Comparación entre el movimiento con pasos completos y micropasos
Un aspecto importante acerca de los micropasos es que usar resoluciones más finas no mejora la precisión posicional. La precisión rotativa promedio de un motor paso a paso es de aproximadamente +/-0,09 grados independientemente de la resolución de los micropasos.
Consideraciones finales
La orientación anterior debe usarse como guía para un dimensionamiento aproximado del sistema. Luego, para arribar a un sistema completamente funcional, suele necesitarse algo de prueba y error. Siempre consulte a un profesional con experiencia en el diseño de sistemas y considere un margen de seguridad adecuado en los cálculos siempre que sea posible. Thomson puede recomendar un producto SMLA para lograr el rendimiento deseado. Los fabricantes de PLC, controladores de movimiento y accionamientos también suelen tener ingenieros dedicados que pueden ayudarlo a seleccionar uno de sus productos.
