Thomson Linear Motion Optmized


Siłowniki liniowe z silnikiem krokowym - Napęd
Szczegóły produktów
Ruch siłowników liniowych z silnikiem krokowym (SMLA) jest osiągany przez dostarczanie kontrolowanych impulsów elektrycznych do wewnętrznych uzwojeń silnika krokowego. Zasilanie tych uzwojeń w określonych sekwencjach czasowych umożliwia programiście manipulowanie obrotami wału silnika i wywoływanie ruchu.
Dokument PDF na ten temat jest dostępny do pobrania (tutaj)
Najbardziej podstawowy układ z otwartą pętlą, napędzający SMLA, może składać się z następujących elementów:
- Programowalny sterownik logiczny (PLC), komputer osobisty (PC) lub mikrosterownik
- Sterownik ruchu
- Napęd silnikiem krokowym

Podstawowa konfiguracja z otwartą pętlą
Podstawowa konfiguracja z otwartą pętlą
Sterownik PLC, komputer PC lub mikrosterownik
Sterownik PLC, komputer PC lub mikrosterownik można traktować jak mózg lub centralną jednostkę obliczeniową (CPU) całego układu. To właśnie tam główny program jest przechowywany, działając jako podstawowy interfejs między użytkownikiem a układem, a także jednostką centralną w celu połączenia ze wszystkimi pozostałymi urządzeniami peryferyjnymi i czujnikami układu. PLC, PC lub mikrosterownik zapewnia także w razie potrzeby nadzór i koordynację między wieloma SMLA i urządzeniami peryferyjnymi / czujnikami układu. Chociaż funkcje PLC, PC i mikrosterowników są generalnie takie same, istnieją niewielkie różnice:
Programowalny sterownik logiczny (PLC)
Sterownik PLC jest komputerem typu barebone bez klawiatury, monitora i myszki. Jest to przeznaczony do określonego celu komputer przemysłowy do zastosowań, w których mogą występować szkodliwe warunki (brud, odłamki, wstrząsy itp.). Sterownik PLC jest zwykle programowany przy użyciu komputera z zastrzeżonym oprogramowaniem dostarczanym przez producenta, więc nie jest wymagany doświadczony programista.
Komputer osobisty (PC)
W niektórych przypadkach standardowy komputer może być używany jako centralna jednostka obliczeniowa układu SMLA. Dzięki odpowiednim kartom i/lub złączom interfejsu komputer PC można podłączyć bezpośrednio do sterownika ruchu i/lub napędu. Często sterowniki ruchu i napędy mogą być dostarczane z zastrzeżonym oprogramowaniem umożliwiającym pracę bez sterownika PLC. Jeśli oprogramowanie do programowania ruchu nie jest dołączone do sterownika ruchu lub napędu krokowego, potrzebny będzie doświadczony programista, aby prawidłowo połączyć się z układem SMLA i obsługiwać go.
Mikrosterowniki
Mikrosterowniki są podobne do sterowników PLC, lecz są o wiele uboższe (brak obudowy, zastrzeżonego oprogramowania itp.). Mikrosterowniki są przeznaczone do wbudowania w większy układ elektryczny lub płytę drukowaną. Chociaż użycie mikrosterownika może być uważane za „uziemienie”, istnieje o wiele większa swoboda w zakresie programowania i integracji elektrycznej z większym układem, a także ogólny koszt jest niższy w porównaniu z PLC lub PC. Ponieważ mikrosterowniki są bardziej zminimalizowane niż PLC, często potrzebny jest doświadczony programista, aby stworzyć oprogramowanie od podstaw.
Sterownik ruchu
W niektórych przypadkach sygnał wysyłany ze sterownika PLC, komputera PC lub mikrosterownika jest nieodpowiedni do użycia przez napęd krokowy. W takich sytuacjach wymagany jest sterownik ruchu, aby pobrał instrukcje z PLC, komputera PC lub mikrosterownika i przekształcił je w postać do wykorzystania przez silnik krokowy. Do sterownika mogą być wysyłane proste sygnały w celu manipulacji położeniem kroku, prędkością i momentem obrotowym SMLA. Sterownik ruchu jest często nazywany „generatorem impulsów”, gdyż komunikuje się z napędem krokowym przez wysyłanie impulsów elektrycznych o różnych amplitudach i częstotliwościach. Wiele nowszych napędów krokowych ma bezpośrednio zintegrowany sterownik. Eliminuje to konieczność stosowania zewnętrznego sterownika i pozwala na bezpośrednie użycie sygnału ze sterownika PLC, komputera PC lub mikrosterownika. Podstawowy układ, będący kombinacją sterownika i napędu, jest przedstawiony poniżej.

układ wykorzystujący kombinację sterownika ruchu i napędu krokowego
układ wykorzystujący kombinację sterownika ruchu i napędu krokowego
Sterownik silnika krokowego
Sterownik silnika krokowego jest ogniwem między sterownikiem a silnikiem krokowym w SMLA. Urządzenie to może być uważane za translator między sterownikiem a silnikiem krokowym. Sygnały ze sterownika są interpretowane przez sterownik silnika i przekształcane/wzmacniane w użyteczny prąd dla silnika. Zapewnia niezbędne zasilanie silnika krokowego. Maksymalny prąd i rozdzielczość mikrokroku są często konfigurowane w sterowniku silnika przy użyciu mikroprzełącznika bezpośrednio w urządzeniu.
Układy z zamkniętą pętlą
W niektórych sytuacjach w układzie wymagany jest sygnał zwrotny z SMLA. Sygnał zwrotny może dać chwilową pozycję SMLA przez interpretację sygnału pochodzącego z kodera, zamontowanego bezpośrednio przy silniku. Zgodny sterownik PLC / komputer PC / mikrosterownik, napęd i/lub sterownik ruchu może odczytać ten sygnał z kodera i dokonać w razie potrzeby niezbędnej regulacji i poprawek ruchu SMLA. Dwa potencjalne układy sygnału zwrotnego SMLA zostały przedstawione na poniższych rysunkach.
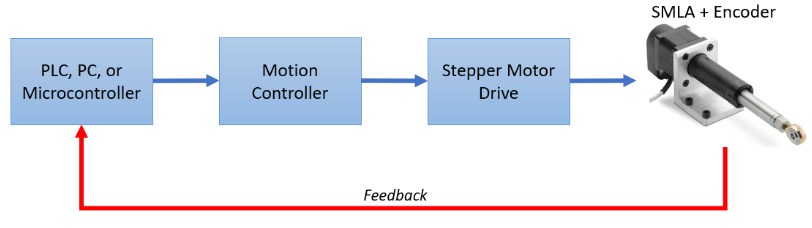
podstawowy układ z zamkniętą pętlą SMLA
podstawowy układ z zamkniętą pętlą SMLA
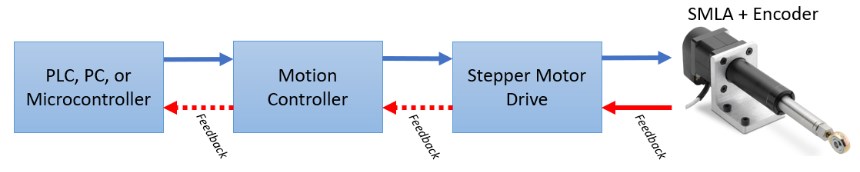
Sygnał zwrotny bezpośrednio do silnika napędowego
Sygnał zwrotny bezpośrednio do silnika napędowego
Dokument PDF na ten temat jest dostępny do pobrania (tutaj)
