Thomson Linear Motion Optmized


Schrittmotor-Linearantriebe - Ansteuerung
Produktdetails
Die Ansteuerung eines Schrittmotor-Linearantriebs (SMLA) erfolgt über die Speisung der Schrittmotor-Spulen mit kontrollierten Stromimpulsen. Durch die Erregung dieser Spulen in bestimmten zeitlichen Abfolgen kann der Programmierer die Drehung der Motorwelle beeinflussen und eine Bewegung auslösen.
Ein PDF-Dokument mit diesem Inhalt erhalten Sie zum Download über diesen (Link)
Die einfachste Form eines rückführungslosen SLMA-Steuerungssystems besteht aus folgenden Komponenten:
- Speicherprogrammierbare Steuerung (SPS), Computer (PC) oder Mikrocontroller
- Motion Controller (Bewegungsablaufsteuerung)
- Schrittmotor-Treiberstufe

Einfache rückführungslose Steuerung (Open Loop)
Einfache rückführungslose Steuerung (Open Loop)
SPS, PC oder Mikrocontroller
Eine SPS, ein PC oder ein Mikrocontroller ist das Gehirn, oder die zentrale Steuereinheit (CPU), des gesamten Systems. Hier befindet sich das Hauptprogramm, das als primäre Schnittstelle zwischen Benutzer und System fungiert, aber auch als Schnittstelle zu allen übrigen Peripheriegeräten und Sensoren im System. Wenn erforderlich, übernimmt die SPS bzw. der PC oder Mikrocontroller außerdem die übergeordnete Steuerung und Koordination zwischen mehreren SMLAs und Peripheriegeräten/Sensoren im System. Wenngleich die Funktionalität von SPS, PC und Mikrocontroller grundsätzlich identisch ist, gibt es dennoch kleine Unterschiede:
Speicherprogrammierbare Steuerung (SPS)
Eine SPS ist ein „nackter“ Computer ohne Tastatur, Monitor oder Maus. Es handelt sich um einen speziell für den industriellen Einsatz konzipierten Computer, der widrigen Bedingungen (Staub, Schmutz, Stößen usw.) ausgesetzt sein kann. Eine SPS wird in der Regel über einen Computer programmiert, auf dem eine herstellerspezifische Software läuft, sodass nicht unbedingt ein erfahrener Programmierer erforderlich ist.
Personal Computer (PC)
In einigen Fällen kann ein Standardcomputer als CPU für ein SMLA-System verwendet werden. Die richtigen Schnittstellenkarten und/oder Anschlüsse vorausgesetzt, kann ein PC direkt an einen Motion Controller bzw. Treiber angeschlossen werden. Häufig werden Motion Controller und Treiber auch mit herstellerspezifischer Software ausgeliefert, die einen Betrieb ohne SPS ermöglicht. Ist eine solche Programmiersoftware im Motion Controller bzw. Schrittmotor-Treiber nicht enthalten, muss ein erfahrener Programmierer die Schnittstelle zum Betrieb des SMLA-Systems herstellen.
Mikrocontroller
Mikrocontroller funktionieren ähnlich wie eine SPS, sind aber deutlich „abgespeckt“ (kein Gehäuse, keine proprietäre Software usw.). Mikrocontroller sind zur Einbindung in ein größeres elektronisches System oder eine Leiterplatte vorgesehen. Obwohl die Verwendung eines Mikrocontrollers als „spartanischer “ angesehen wird, bietet sie deutlich mehr Freiheiten in Bezug auf die Programmierung und die elektrische Integration in ein größeres System. Außerdem sind die Kosten insgesamt geringer als bei einer SPS oder einem PC. Da Mikrocontroller minimalistischer sind als eine SPS, ist zumeist ein erfahrener Programmierer erforderlich, um die Software von Grund auf zu entwickeln.
Motion Controller
In einigen Fällen ist das von der SPS, dem PC oder dem Mikrocontroller ausgegebene Signal für den Schrittmotor-Treiber nicht verwendbar. Dann ist ein Motion Controller erforderlich, der die Befehle aus SPS/PC oder Mikrocontroller empfängt und für den Schrittmotor-Treiber aufbereitet. Zum Motion Controller können einfache Signale gesendet werden, um die Schrittposition, Drehzahl und das Drehmoment des SMLA zu beeinflussen. Ein Motion Controller wird auch häufig „Impulsgenerator“ genannt, da er mit dem Schrittmotor-Treiber kommuniziert, indem er elektrische Impulse mit unterschiedlicher Amplitude und Frequenz ausgibt. In vielen der neueren Schrittmotor-Treibern ist eine Controller direkt integriert. Damit erübrigt sich ein externer Controller, und das Signal von der SPS bzw. vom PC oder Mikrocontroller kann direkt genutzt werden. Im Folgenden ein einfaches System mit einer Kombination aus Controller und Treiberstufe.

Konfiguration mit einem kombinierten Controller und Schrittmotor-Treiber.
Konfiguration mit einem kombinierten Controller und Schrittmotor-Treiber.
Schrittmotor-Treiber
Der Schrittmotor-Treiber (auch Endstufe genannt) ist das Bindeglied zwischen dem Controller und dem Schrittmotor des SMLA. Er fungiert gewissermaßen als Übersetzer zwischen dem Controller und dem Schrittmotor. Die Signale aus der Controller werden vom Treiber interpretiert und in einen für den Motor nutzbaren Strom gewandelt/verstärkt. Der Treiber liefert somit die erforderliche Leistung, um den Schrittmotor anzutreiben. Die maximale Stromstärke und Mikroschritt-Auflösung werden häufig im Treiber direkt über DIP-Schalter am Gerät konfiguriert.
Geschlossene Regelkreise mit Rückführung (Closed Loop)
Zuweilen ist innerhalb des Systems eine Rückführung vom SMLA erforderlich. Über die Rückführung erhalten Sie die aktuelle Position des SLMA, indem das Signal aus dem direkt am Motor angeschlossenen Encoder ausgewertet wird. SPS/PC/Mikrocontroller, Treiber und/oder Motion Controller können dieses vom Encoder gelieferte Signal auslesen und ggf. die erforderlichen Anpassungen an der Bewegung des SMLA vornehmen. In den nachfolgenden Abbildungen sind zwei mögliche SMLA-Rückführungssysteme abgebildet.
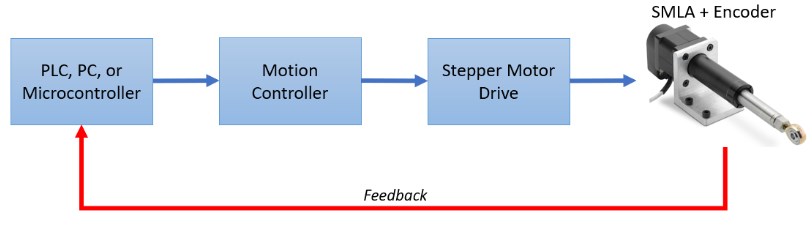
Einfaches SMLA-Regelungssystem
Einfaches SMLA-Regelungssystem
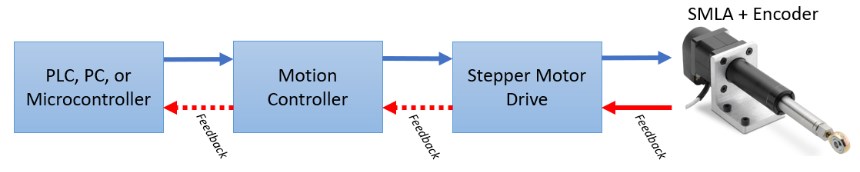
Rückführung direkt zur Motor-Treiberstufe
Rückführung direkt zur Motor-Treiberstufe
Ein PDF-Dokument mit diesem Inhalt erhalten Sie zum Download über diesen (Link)
