

Mehr als acht Millionen Amerikaner und Kanadier sind auf Krückstöcke oder Achselkrücken angewiesen. Und die meisten von ihnen kennen das Problem: wohin mit den Gehhilfen, wenn sie nicht gebraucht werden? Unterstützt von Thomson Industries, Inc., hat ein Team aus Maschinenbau-Studierenden der University of Waterloo (in der kanadischen Provinz Ontario) den Prototyp einer möglichen Lösung entwickelt – eine Achselkrücke, die mittels einer elektrischen Linearaktuator-Baugruppe automatisch selbst stehen kann.
Das muss doch besser gehen
Nach Erstellung einer Studie zu den Herausforderungen, denen Menschen mit Gehbehinderung im wahrsten Sinne des Wortes gegenüberstehen, war das Waterloo-Team erstaunt, wie sehr Krücken ihre Nutzer im Alltag beeinträchtigen. „Will man schlicht ein Glas Wasser trinken, kann man seine Krücke nicht einfach loslassen; sondern man muss sie irgendwie sicher abstellen“, erklärt Connor McCallum, einer der Leiter des Elektrotechniker-Teams, das Problem. „Kippt die Krücke um, fällt es vor allem Menschen mit Behinderung schwer, sie wieder aufzuheben. Und was macht man im Restaurant mit den Krücken? Räumt ein Kellner sie weg, ist man plötzlich gar nicht mehr mobil.“
Angesichts dieser Beobachtungen entschloss sich das Team im Rahmen ihres Abschlussprojekts, sein mechanisches und elektronisches Know-how zur Entwicklung einer neuen Krückenlösung einzusetzen. Den Studierenden schwebte als Lösung eine automatisch selbststehende Achselkrücke vor. Die Nutzer sollten die Hände frei haben, um ihre Alltagstätigkeiten durchzuführen, aber dennoch immer direkten Zugriff auf ihre Stütze behalten.
Eine Vision wird verwirklicht
Das Waterloo-Team erarbeitete zunächst eine CAD-Grobskizze, die stativartige Stützbeine am unteren Ende der Krücke vorsah, die automatisch ausklappen sollten, sobald die Krücke aus der Achselhöhle entfernt bzw. der Krückengriff losgelassen wird.
Beim Ausklappen würden die Beine eine rund 10 cm große Standfläche bilden – groß genug, um die Krücke gegen Umkippen zu sichern. Für zusätzliche Standfestigkeit entwarfen die Studierenden mehrere kleinere Streben, um die Hauptbeine von innen abzustützen. Nach ihrer Hypothese würde für die Betätigung der Beine eine Art motorbetriebener, rotierender Linearantrieb erforderlich sein. Ihre daraufhin durchgeführte Onlinesuche nach Herstellern führte sie schließlich zu Thomson.
Ein beratender Ansatz
Auf der Thomson-Website fanden die Studierenden Schrittmotor-Linearantriebe. Diese Komponenten kombinieren einen hybriden Schrittmotor und einen Präzisions-Trapezgewindetrieb zu einer kompakten Einheit, die ihrer Meinung nach perfekt ans Ende der Krücke passen würde. Mittels Online-Produktfinder und Eingabe der gewünschten Bewegungsparameter nahm die Lösung erste Gestalt an. Zum Optimieren ihrer Produktauswahl nutzten sie zusätzlich das Angebot zur virtuellen Live-Beratung durch einen Thomson-Ingenieur – ein kostenfreier Service, der online gebucht werden kann.
„Die Studenten präsentierten ein vorläufiges 3D-Modell ihres Konzepts, das als gute Grundlage für unseren Austausch darüber diente, was genau sie erreichen wollten“, erinnert sich Kyle Thompson, Product Innovation Manager bei Thomson. „Wir besprachen die Optionen bezüglich der Hublängen, Abstände, Verstellzeiten, Geschwindigkeiten sowie Beschleunigung und Verzögerung – immer unter Zuhilfenahme unseres Online-Planungstools.“
Der Entwurf wird weiterentwickelt
Im Laufe der weiteren Zusammenarbeit bildete sich schrittweise die ideale Baugruppe heraus: Ein Schrittmotor sollte eine Gewindespindel antreiben, entlang der sich die Mutter bewegt. Die Mutter sollte zwei anmontierte Flansche bewegen, die auf der Mittelachse der Krücke auf- und abfahren. Ein Flansch würde mit den äußeren Hauptbeinen (rot in Abbildung 1) verbunden werden, der zweite mit den inneren Stützstreben (grün in Abbildung 1). Beide Flansche sollten von nur einem Aktuator betätigt werden.
Um die Beine auszuklappen sollte der Motor die Mutter, und damit beide Flansche, nach unten fahren, bis der untere Flansch einen mechanischen Endanschlag erreicht, der die inneren Streben in ihrer Stützstellung fixiert. Der obere Flansch sollte weiter nach unten fahren, um die Hauptbeine auszuklappen und auf diese Weise das Stativ zu bilden. Die gegenläufige Motordrehrichtung kehrt diesen Vorgang um und klappt die Beine wieder ein.
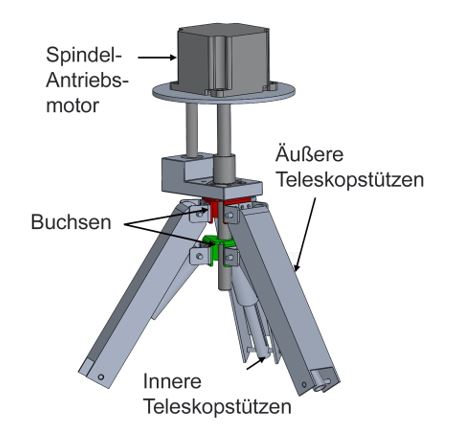
Abbildung 1: Das Design der Krückenabstützung umfasst einen oberen Flansch (rot), der die Hauptbeine betätigt und einen unteren Flansch (grün), der die innenliegenden Stützstreben bewegt.
Mithilfe des Tools, und in Zusammenarbeit mit Kyle, legte das Waterloo-Team seine Wunschliste der Spezifikationen vor. Die Aktuator-Baugruppe musste ca. 140 kg (~1340 N) Kraft liefern, die Beine mussten bei einem Verstellweg von rund 5 cm in weniger als einer Sekunde aus- und einklappen, als Stromquelle sollte eine leichte Batterie dienen, während eine ultrahohe Präzision nicht erforderlich war.
Die Analyse ergab, dass ein Thomson Schrittmotor-Linearantrieb, gespeist durch eine 12-Volt-Batterie, die ideale Lösung für den Prototyp war. Er würde mühelos die geforderte Verstellkraft liefern, ein NEMA23-Schrittmotor würde die Bewegung in weniger als einer Minute durchführen, eine 15 cm lange Spindel mehr als die geforderten 5 cm Hub und ein Standard-Aktuator die erforderliche Präzision liefern. Wenngleich damit das Bewegungsprofil befriedigt war, wies Kyle das Team auf einen weiteren Punkt hin, den es zu beachten galt.
Führung als Verdrehschutz
Da sich die Mutter frei auf der rotierenden Spindel bewegen können muss, kann sie sich auch mit der Spindel drehen, was die Linearbewegung unterbrechen würde. Um das zu verhindern, half Kyle dem Team dabei, einen speziellen L-förmigen Block zu konstruieren, der mit der Mutter verbunden wird und sich parallel zu ihr entlang der Hauptachse bewegt. Darüber hinaus ist dieser Block über eine Lagerbuchse mit einer Führungswelle verbunden, die an einer Platte direkt unterhalb des Motors verankert ist (Abbildung 2).
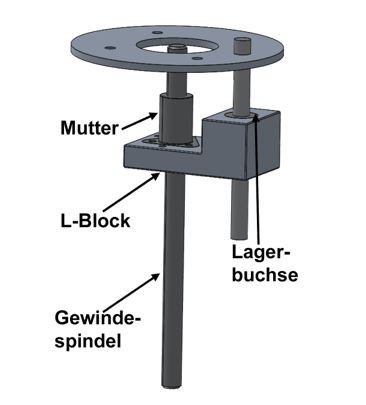
Abbildung 2: Ein nachgerüsteter L-förmiger Block hindert die Mutter daran, sich mitzudrehen und unerwünschte Reibung zu verursachen.
„Die virtuelle Planungssitzung von Thomson hat geholfen, unsere Auswahl schnell einzugrenzen und herauszufinden, welches Produkt für unsere Spezifikationen das beste ist“, konstatiert McCallum. „Der Online-Produktfinder hat uns auf die Sprünge geholfen, während Kyle bei der Anpassung und Optimierung unserer Lösung eine wertvolle Hilfe war. Die Lösung des Verdrehschutz-Problems ist ein Paradebeispiel dafür, wie hilfreich die Unterstützung durch einen Experten ist.“
In ausgeklappter Stellung steht die Krücke auf einem Radius von rund 10 cm und die inneren Stützstreben stehen um 40° aus der Senkrechten. Die äußeren Beine sind um weniger als 45° ausgeklappt, damit sie beim Zurückfahren in die Ruhestellung nicht nach außen klappen können (Abbildung 3).

Abbildung 3: Die selbststehende Achselkrücke in stehender Position.
Die Ein- und Ausfahrgeschwindigkeit beträgt 0,6 Sekunden bei einem Verstellweg von ca. 5 cm, was rund 8,4 cm pro Sekunde entspricht. Das Team hat die Geschwindigkeit bewusst begrenzt, um eine Beschädigung der Prototyp-Krücke zu verhindern. Die lasttragenden Komponenten können bis zu 136 kg aufnehmen.
Smarte Bedienung
Wie in den violetten Bereichen in Abbildung 4 dargestellt, hat das Team die Elektronik gleichmäßig verteilt, um die Krücke optimal auszubalancieren. Ein Mikroprozessor in einer Elektronikbox oben am Krückenrahmen empfängt analoge Signale von Drucksensoren in der Achselauflage, im Griff und im Fuß der Krücke und sendet sie an die darunter befindliche Motorsteuerung.
Die Motorsteuerung soll später über Kabel, die durch die Hohlrohre der Krücke geführt werden, mit dem Motor verbunden werden; beim Prototyp lagen die Kabel noch offen. Zur Ermittlung der Stellung der Stützbeine werden Grenzschalter genutzt, Die Beine werden über Drucksensoren an der Krücke gesteuert. Sie ermitteln, ob die Krücke selbst stehen soll, ob sie gerade nicht genutzt wird, oder ob ihre Stützen einklappen sollen, damit der Benutzer mit ihr gehen kann.
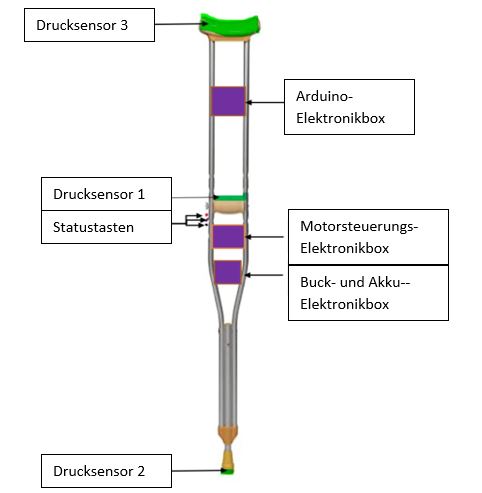
Abbildung 4: Elektroniksteuerung der selbststehenden Krücke.
Die Drucksensoren mussten zur alltäglichen, normalen Nutzung kompatibel sein. Der untere Sensor, der meldet, ob die Krücke den Boden berührt, benötigt einen relativ niedrigen Schwellenwert zur Aktivierung. Die Sensoren in der Achselauflage und am Handgriff hingegen lösen das Ausklappen der Stützbeine aus und benötigen daher einen etwas höheren Druck-Schwellenwert, um ein vorzeitiges Auslösen zu verhindern. Ein Bedienfeld mit drei Tasten direkt oberhalb der Elektronikbox der Motorsteuerung erlaubt dem Nutzer das Umgehen der automatischen Steuerung.
Gutes noch besser machen
Nachdem das Team die elektrischen und mechanischen Komponenten zusammengebaut und in die Krücke integriert hatte, funktionierte sie wie für ihren Einsatzzweck vorgesehen und erfüllte sämtliche Anforderungen. Die Krücke hat automatisch erkannt, wenn sie losgelassen wurde, und entsprechend reagiert. Es war außerdem möglich, zwischen manueller und automatischer Betätigung umzuschalten.
Jetzt, da das Team in Waterloo einen funktionierenden Prototyp in Händen hat, überlegt man, wie die Krücke weiter verbessert werden könnte. Dazu gehört, sie optisch attraktiver zu gestalten sowie Platinen, andere Werkstoffe und einen kleineren Motor zu verwenden, um Platz und Gewicht einzusparen, und die Kabel durch die Rohre anstatt außen zu führen. Wo auch immer ihre Ideen hinführen – die Teammitglieder können sich darauf verlassen, dass das Thomson-Team an ihrer Seite steht.