

Quando os projetistas e integradores precisam de atuação linear simples, flexível e compacta, eles geralmente se voltam para atuadores lineares de motor de passo (SMLAs). A alta configurabilidade dos SMLAs está entre suas maiores virtudes, mas a classificação de inúmeras opções de configuração para adaptar a solução ideal para uma determinada aplicação pode ser um desafio até mesmo para o engenheiro de movimento mais experiente. Compreender as capacidades e limitações únicas de cada tipo de SMLA tornará mais fácil tirar o máximo proveito de sua ampla gama de flexibilidade.
Por que SMLAs?
Muitos fatores tornam os SMLAs desejáveis para atuação linear, com seus altos níveis de personalização e configurabilidade sendo os maiores. Seu design eficiente permite a configuração de inúmeras opções de motor, parafuso de avanço e porca de avanço em um conjunto exclusivo para cada aplicação.
Os SMLAs também são populares porque o motor de passo oferece um nível básico de controle sem exigir dispositivos de feedback externos, como codificadores. O projetista pode programar um motor de passo para se mover para uma posição exata em várias resoluções sem exigir qualquer feedback para um driver ou controlador. Isso pode tornar o custo geral e a complexidade mais baixos do que servos, DC sem escovas e outras opções de motor.
Motores de passo e parafusos de avanço também são naturalmente compatíveis, o que contribui para a alta configurabilidade do SMLA. Este ajuste natural é evidente quando se trata de faixas de velocidade ideais, capacidades de carga e precisão posicional.
Além disso, os parafusos de avanço e os motores de passo oferecem muitas opções disponíveis para personalização. Os parafusos de avanço, por exemplo, podem ser personalizados para usinagem final, revestimento, precisão, forma de rosca e comprimento, enquanto os motores de passo oferecem opções para otimizar os enrolamentos do motor para torque e velocidade e para especificar cabeamento, conectores, codificadores e usinagem de tampa de extremidade específicos da aplicação. A integração de motores de passo com parafusos de avanço aumenta drasticamente o número de projetos possíveis.
Tipos de SMLA
Embora o número de combinações possíveis seja alto, os SMLAs geralmente estão disponíveis em três estilos distintos: parafuso rotativo, porca rotativa e telescópico. (Figura 1)
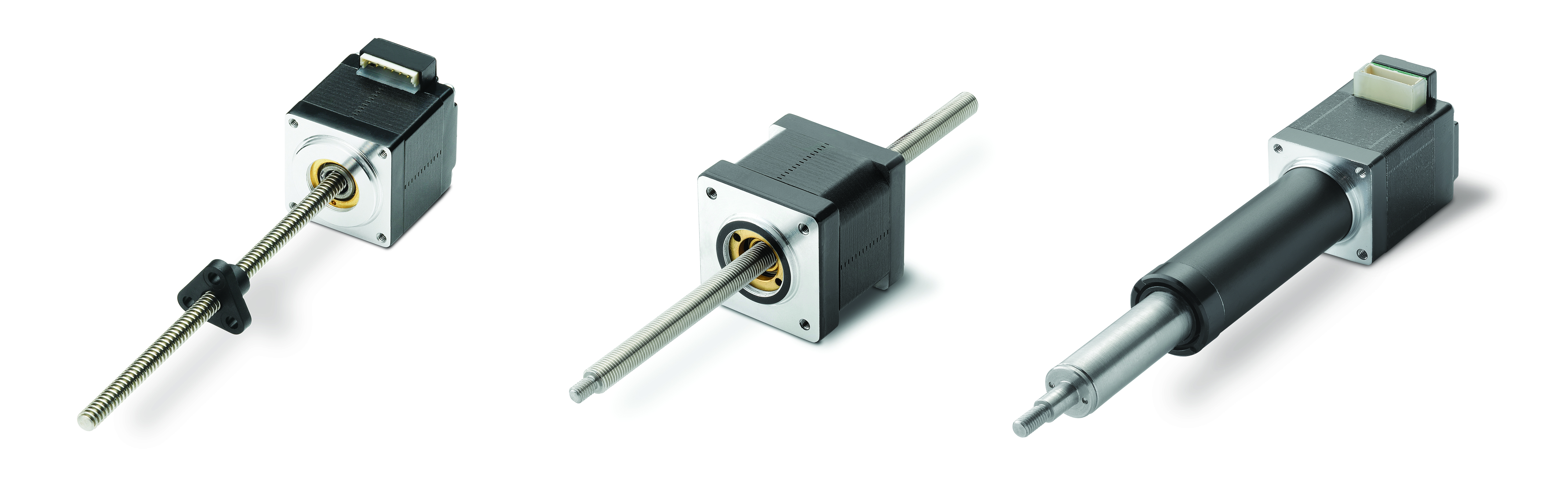
Figura 1. Os três tipos de SMLAs (da esquerda para a direita: parafuso rotativo, porca rotativa e telescópico) apresentam mecânicas únicas que os tornam ideais para aplicações variadas.
Cada um dos estilos SMLA consiste nos mesmos componentes gerais: um motor de passo (1), parafuso de avanço (2) e porca de avanço (3), mas como mostrado nas Figuras 2 a 4, a mecânica do núcleo difere com base no papel da porca.
Estrutura e mecânica do parafuso rotativo
A configuração do parafuso rotativo, que também é conhecida como um parafuso de avanço motorizado, linear externo, porca externa ou porca de translação, permite a maior flexibilidade e personalização do projeto. Como o nome indica, a atuação ocorre quando o parafuso de avanço gira. Quando devidamente contida para evitar que gire com o parafuso de avanço, a porca de avanço irá transladar através do comprimento roscado do parafuso de avanço.
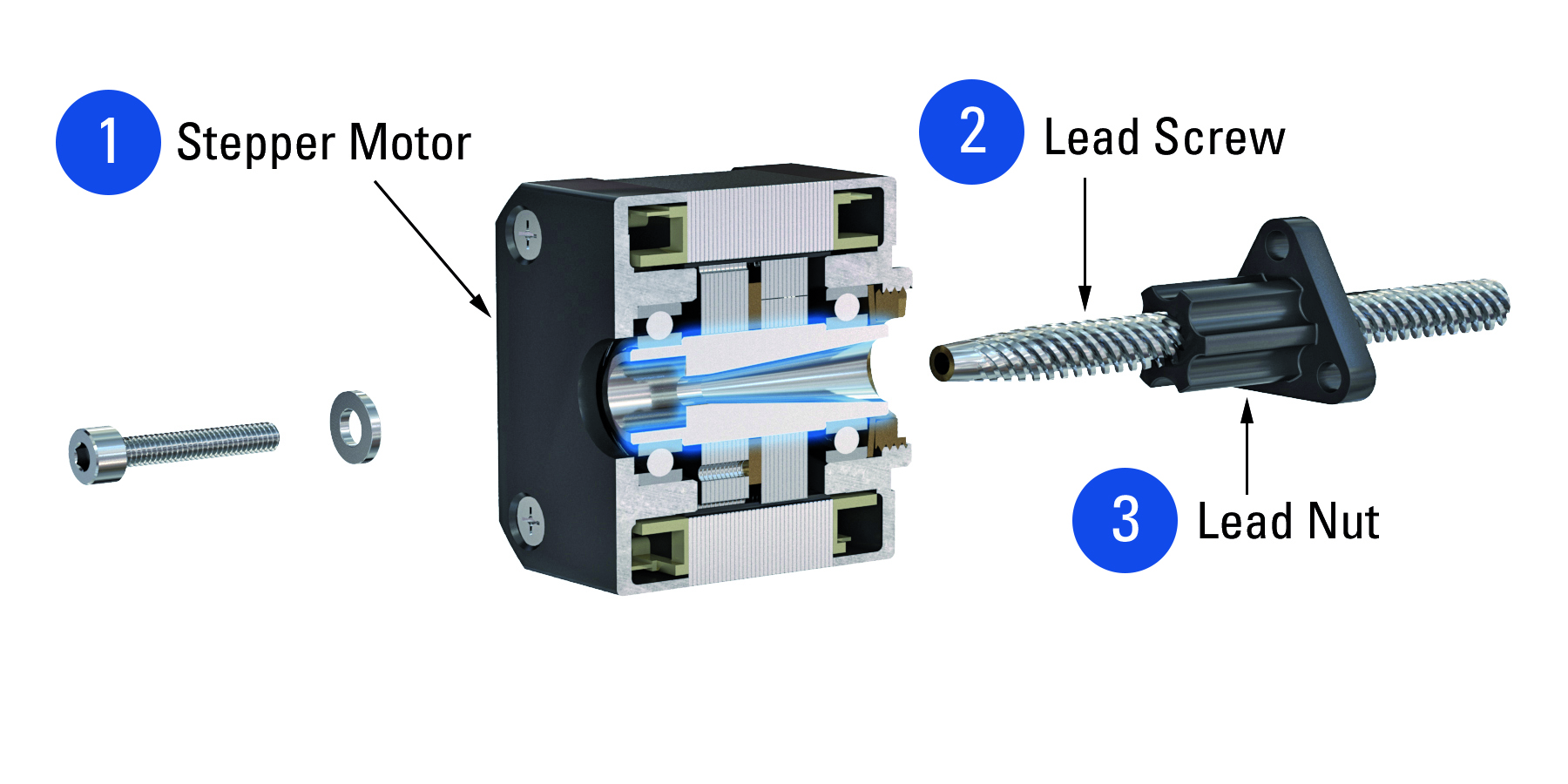
Figura 2. Vista em corte de uma configuração de parafuso rotativo.
Estrutura e mecânica da porca rotativa
O conjunto de porcas rotativas tem o design mais mínimo e compacto das três configurações. Este projeto permite o comprimento total e retraído mais curto, sem praticamente nenhuma rotação visível de qualquer um de seus componentes. Outros nomes para este estilo de atuador são porca de avanço motorizada, não cativa, porca interna e parafuso de translação.
A mecânica de uma porca rotativa SMLA é essencialmente o inverso da configuração do parafuso rotativo. Quando o motor é acionado, a porca de avanço integrada dentro do eixo do motor gira e induz o parafuso de avanço preso a uma carga para transladar para dentro e para fora do motor.
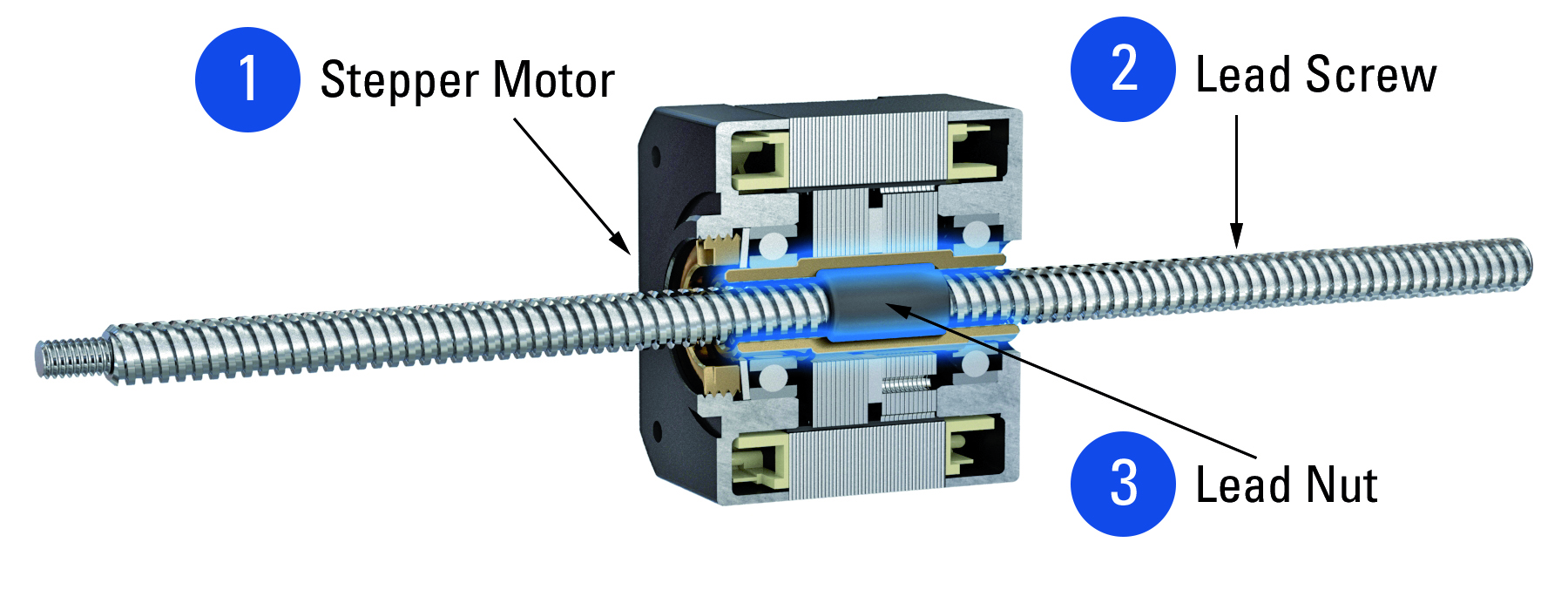
Figura 3. Vista em corte de uma configuração de porca rotativa.
Estrutura e mecânica telescópica
Os atuadores de estilo telescópico destinam-se a funcionar mais como os atuadores de estilo de haste tradicionais encontrados na maioria das aplicações industriais, enquanto ainda têm os benefícios de um motor de passo configurável e unidade à base de parafuso de avanço. Em seu núcleo, o atuador telescópico é uma configuração de parafuso rotativo com componentes de carcaça extras que "capturam" a porca de avanço dentro de uma ranhura e usam uma bucha interna para fornecer algum suporte de carga lateral e de momento. Como essas configurações incorporam orientação e suporte diretamente em seu design, em muitos casos, elas não precisarão dos componentes externos que poderiam ser necessários. Outros nomes para este estilo de atuador são atuador de parafuso de avanço motorizado, cativo, haste elétrica e cilindro elétrico.
A mecânica de um SMLA telescópico é semelhante à de uma configuração de parafuso rotativo. A principal diferença é que sua configuração integra componentes de orientação e suporte na forma de um tubo de cobertura estriado e tubo de extensão com uma bucha de suporte, que permite o movimento sem a necessidade de componentes externos.
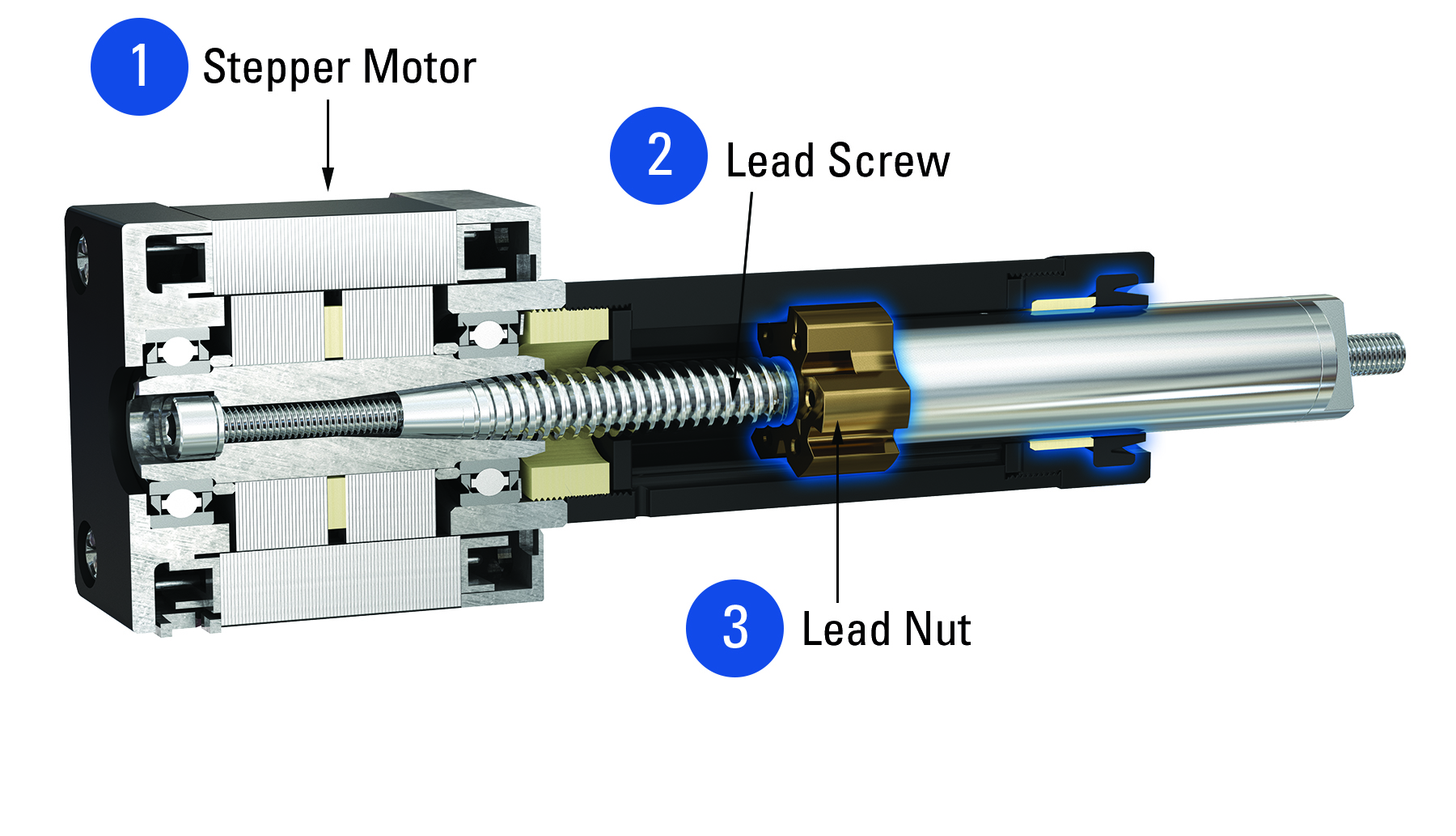
Figura 4. Vista em corte de uma configuração de estilo telescópico.
Instalação
Todas as três configurações de SMLA têm um processo de instalação semelhante, que consiste principalmente na montagem do motor, no suporte do parafuso de avanço, se necessário, e na fixação da carga. As principais diferenças residem em onde a carga é fixada e como ela é suportada. (Figura 5) Para configurações de parafuso rotativo, a carga se conecta à porca de avanço, e a extremidade do parafuso de avanço precisará ser suportada com um rolamento ou bucha para comprimentos mais longos.
Para configurações de porca rotativa, a carga é anexada ao parafuso de avanço. E para a configuração telescópica, a carga será anexada à montagem final no tubo de extensão.
Ambas as configurações de parafuso e porca rotativos são destinadas a suportar apenas cargas axiais, de modo que a orientação e o suporte na forma de rolamentos lineares e trilhos de guia serão necessários para o funcionamento adequado. Uma vez que a orientação e o suporte são tipicamente integrados em atuadores telescópicos, a necessidade de rolamentos lineares e trilhos de guia pode ser eliminada em muitos cenários.
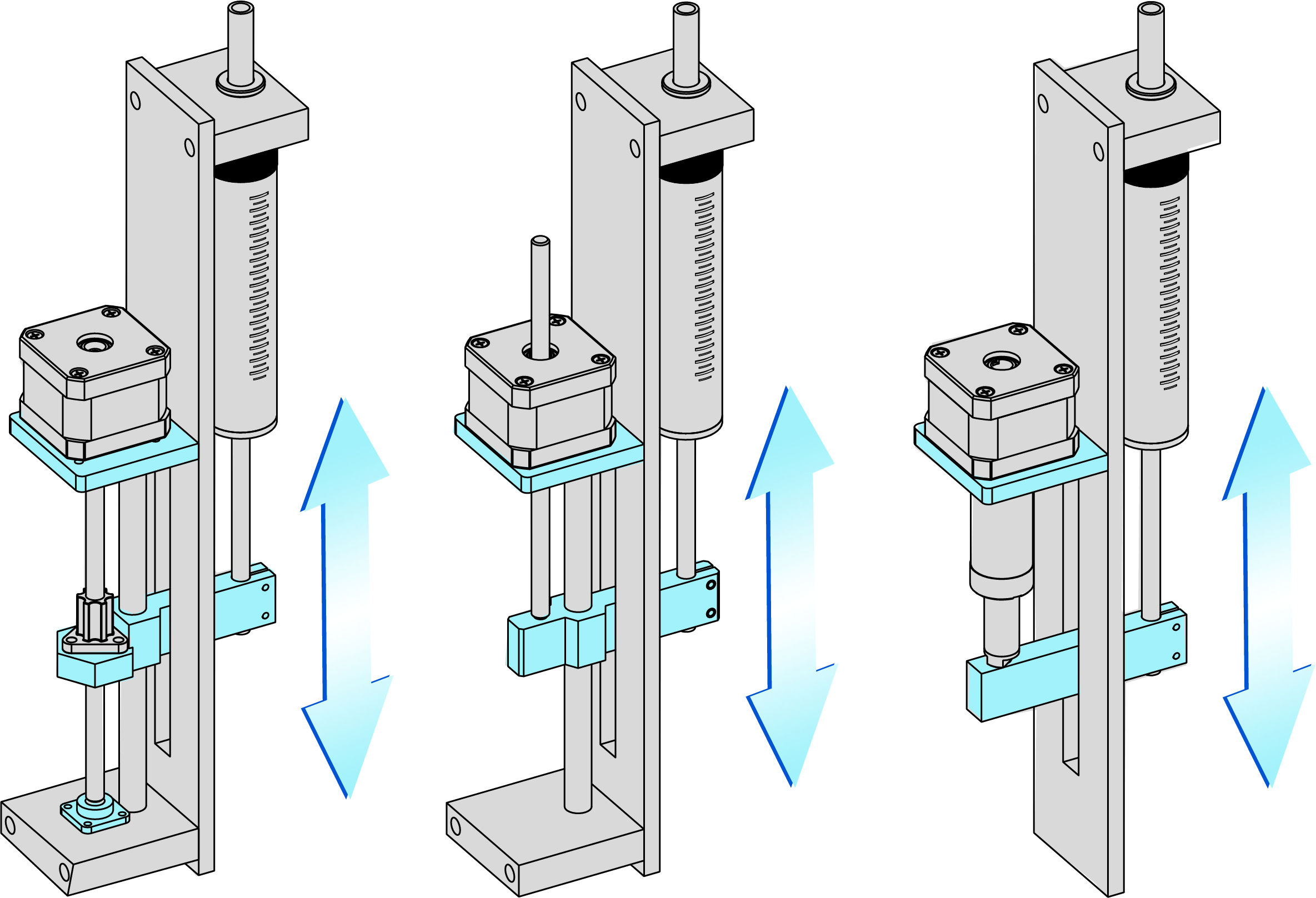
Figura 5. Este exemplo de aplicação de bomba de fluido ilustra as configurações de montagem típicas para todos os três SMLAs (da esquerda para a direita: parafuso rotativo, porca rotativa, telescópica).
Dimensionamento para aplicações
Os altos níveis de personalização e configurabilidade do SMLA oferecem inúmeras possibilidades de aplicação. A Figura 6 mostra alguns exemplos comuns de aplicações SMLA.
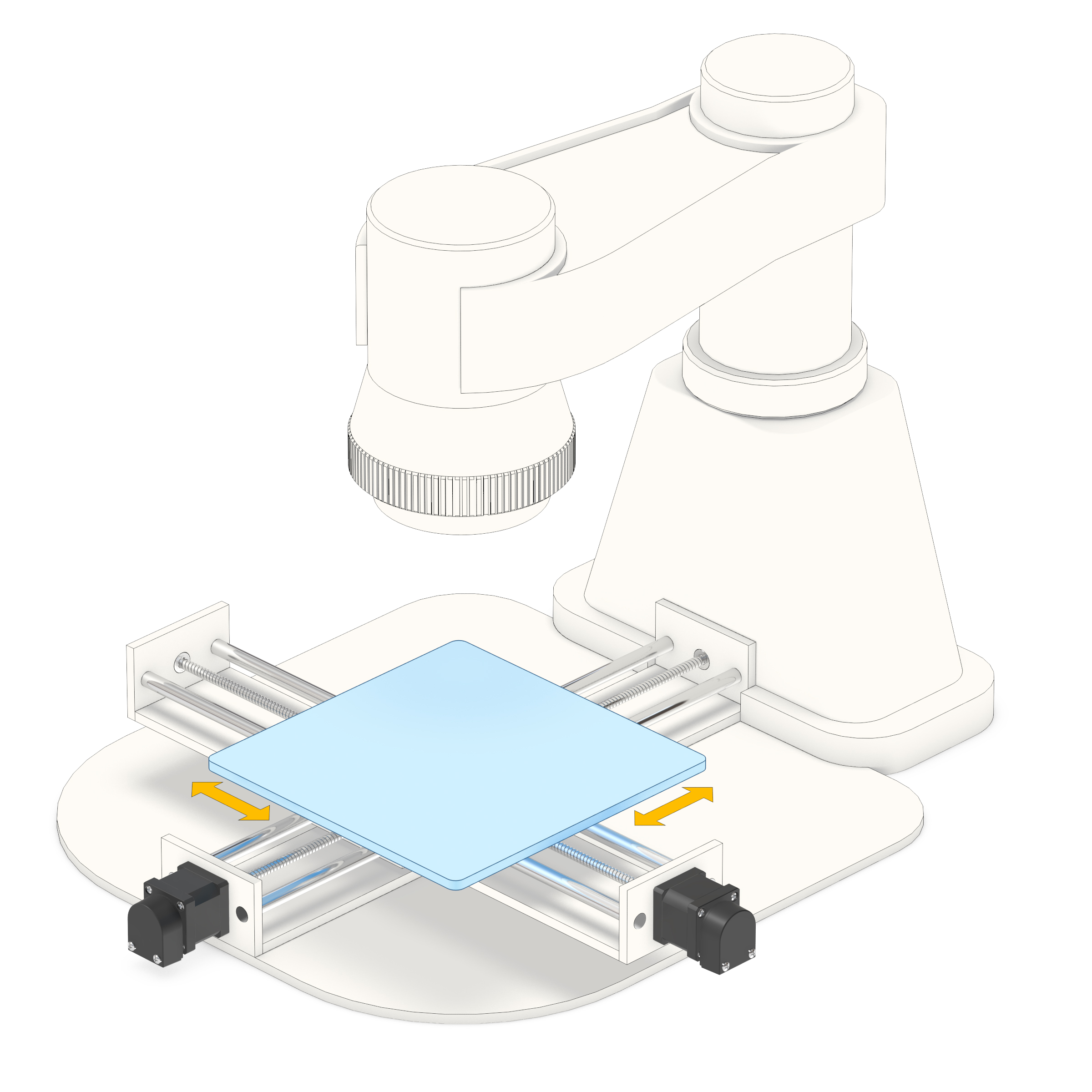
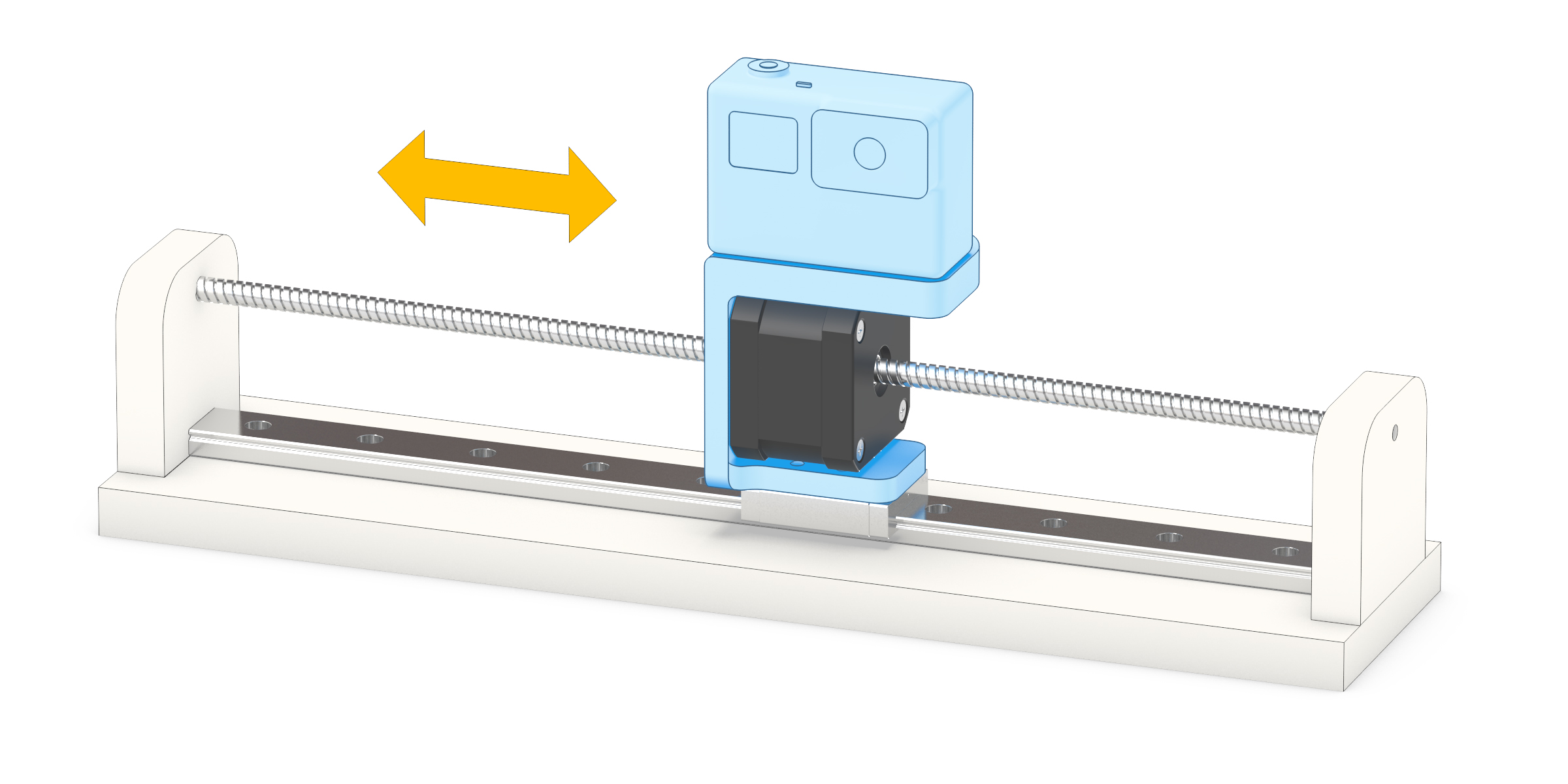
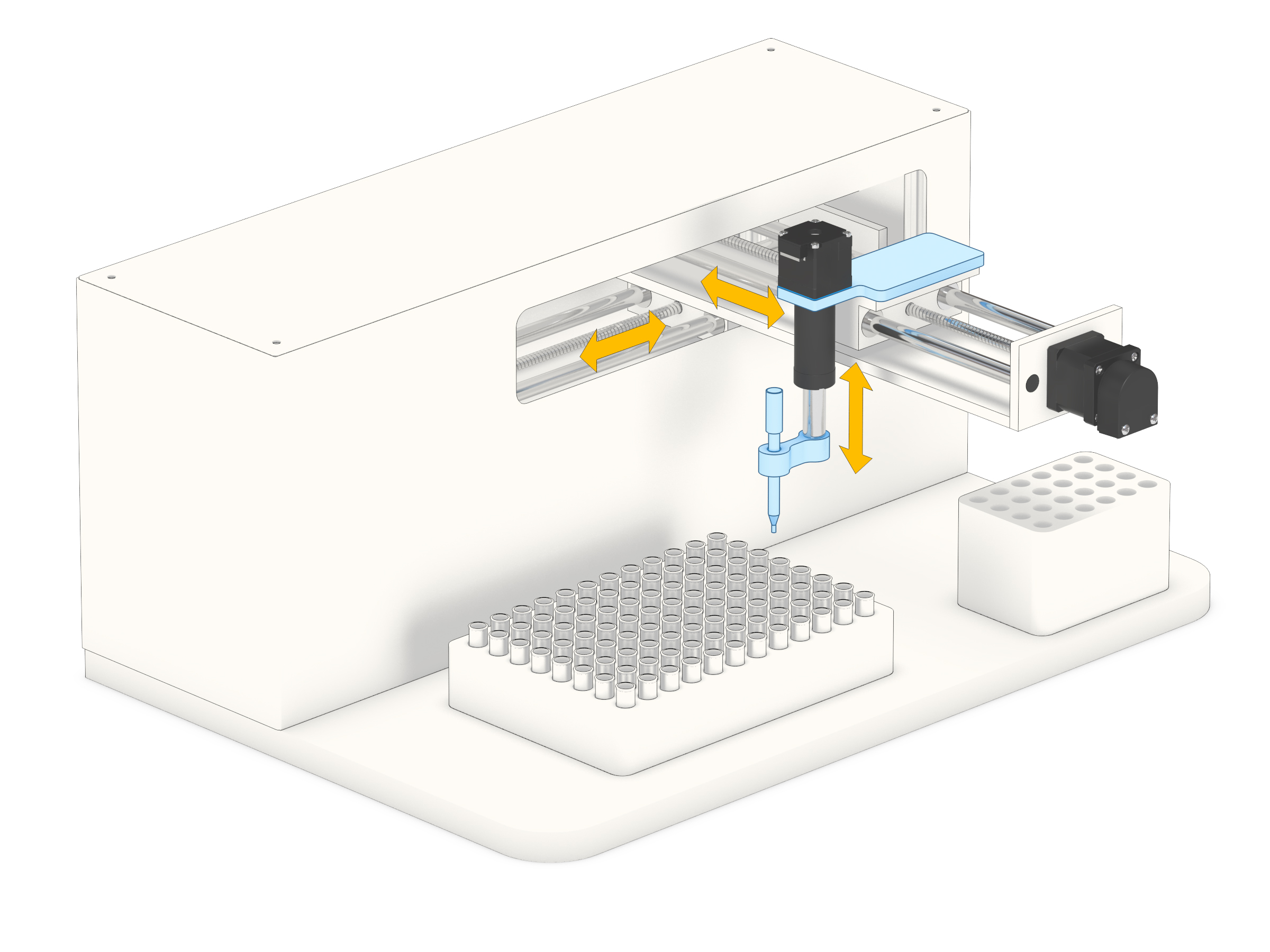
Figura 6. Ao reduzir o número total de componentes necessários, os SMLAs são ideais para uma ampla variedade de aplicações com consciência de espaço, incluindo (da esquerda para a direita): estágio XY (parafusos rotativos), posicionamento horizontal (porca rotativa) e pipetagem de fluido (parafuso telescópico e rotativo).
O dimensionamento de um SMLA para uma aplicação específica, então envolve principalmente a compreensão do motor, parafuso de avanço e limitações da porca de avanço. Cada um desses componentes principais deve ser dimensionado adequadamente para garantir a funcionalidade adequada e a vida útil ideal. Felizmente, a maioria dos fabricantes fornece gráficos de desempenho teórico que consideram esses componentes, tornando muito mais fácil dimensionar um atuador rapidamente. Esses gráficos geralmente assumem a forma de uma curva de velocidade vs. carga e destacam a faixa de desempenho ideal da combinação de motor, parafuso e porca.
Comparando SMLAs
Os SMLAs permitem uma abordagem modular de projeto de sistema de movimento que permite que os engenheiros alcancem uma solução altamente adaptada aos seus requisitos de aplicação específicos. Determinar qual dos três SMLAs é o melhor depende de muitos fatores orientados pela aplicação.
Aqueles que buscam a máxima personalização ou uma combinação verdadeiramente única de componentes devem considerar atuadores de parafuso rotativos. Os designs de parafusos rotativos são o tipo de SMLA mais comumente implantado, então muitos engenheiros já estarão bastante familiarizados com eles.
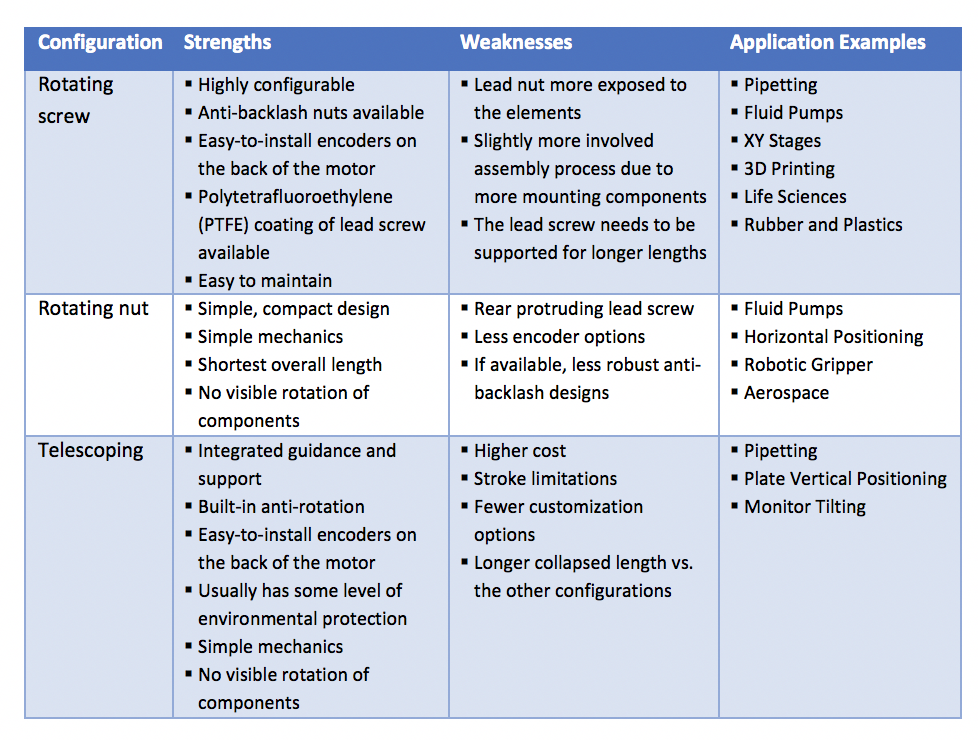
Aplicações que se beneficiariam de um atuador mais compacto e simples e que não requerem uma porca antirretorno ou muitas opções de codificadores podem ser melhor atendidas por projetos de porcas rotativas. Os engenheiros que preferem cair em um projeto de atuador mais tradicional e em estilo de haste e cujas aplicações se beneficiariam da orientação integrada, suporte e antirrotação embutida devem considerar o projeto telescópico. Essa configuração também vale a pena considerar se a redução da contagem geral de componentes é importante porque os componentes de orientação/suporte integrados eliminam a necessidade de comprar externos. A Tabela 1 resume os pontos fortes e fracos mais comuns de cada configuração SMLA, bem como alguns exemplos de aplicação comuns.
Para auxiliar projetistas e integradores a percorrer as muitas opções, os fabricantes de SMLA estão cada vez mais oferecendo ferramentas on-line para ajudá-los a configurar soluções de forma rápida e fácil para suas aplicações. Por exemplo, existem ferramentas de seleção on-line que permitem aos usuários identificar o SMLA certo para sua aplicação em questão de minutos, enquanto acessam imediatamente características de desempenho, modelos 3D, preços e tempo de espera.
A aplicação de ferramentas de seleção automatizadas no contexto de uma compreensão do design, mecânica, instalação e dimensionamento dos três principais tipos de SMLA pode ajudar a orientar os projetistas e integradores de movimento para a escolha ideal para suas aplicações.
Quando os projetistas e integradores precisam de atuação linear simples, flexível e compacta, eles geralmente se voltam para atuadores lineares de motor de passo (SMLAs). A alta configurabilidade dos SMLAs está entre suas maiores virtudes, mas a classificação de inúmeras opções de configuração para adaptar a solução ideal para uma determinada aplicação pode ser um desafio até mesmo para o engenheiro de movimento mais experiente. Compreender as capacidades e limitações únicas de cada tipo de SMLA tornará mais fácil tirar o máximo proveito de sua ampla gama de flexibilidade.
Por que SMLAs?
Muitos fatores tornam os SMLAs desejáveis para atuação linear, com seus altos níveis de personalização e configurabilidade sendo os maiores. Seu design eficiente permite a configuração de inúmeras opções de motor, parafuso de avanço e porca de avanço em um conjunto exclusivo para cada aplicação.
Os SMLAs também são populares porque o motor de passo oferece um nível básico de controle sem exigir dispositivos de feedback externos, como codificadores. O projetista pode programar um motor de passo para se mover para uma posição exata em várias resoluções sem exigir qualquer feedback para um driver ou controlador. Isso pode tornar o custo geral e a complexidade mais baixos do que servos, DC sem escovas e outras opções de motor.
Motores de passo e parafusos de avanço também são naturalmente compatíveis, o que contribui para a alta configurabilidade do SMLA. Este ajuste natural é evidente quando se trata de faixas de velocidade ideais, capacidades de carga e precisão posicional.
Além disso, os parafusos de avanço e os motores de passo oferecem muitas opções disponíveis para personalização. Os parafusos de avanço, por exemplo, podem ser personalizados para usinagem final, revestimento, precisão, forma de rosca e comprimento, enquanto os motores de passo oferecem opções para otimizar os enrolamentos do motor para torque e velocidade e para especificar cabeamento, conectores, codificadores e usinagem de tampa de extremidade específicos da aplicação. A integração de motores de passo com parafusos de avanço aumenta drasticamente o número de projetos possíveis.
Tipos de SMLA
Embora o número de combinações possíveis seja alto, os SMLAs geralmente estão disponíveis em três estilos distintos: parafuso rotativo, porca rotativa e telescópico. (Figura 1)
Figura 1. Os três tipos de SMLAs (da esquerda para a direita: parafuso rotativo, porca rotativa e telescópico) apresentam mecânicas únicas que os tornam ideais para aplicações variadas.
Cada um dos estilos SMLA consiste nos mesmos componentes gerais: um motor de passo (1), parafuso de avanço (2) e porca de avanço (3), mas como mostrado nas Figuras 2 a 4, a mecânica do núcleo difere com base no papel da porca.
Estrutura e mecânica do parafuso rotativo
A configuração do parafuso rotativo, que também é conhecida como um parafuso de avanço motorizado, linear externo, porca externa ou porca de translação, permite a maior flexibilidade e personalização do projeto. Como o nome indica, a atuação ocorre quando o parafuso de avanço gira. Quando devidamente contida para evitar que gire com o parafuso de avanço, a porca de avanço irá transladar através do comprimento roscado do parafuso de avanço.
Figura 2. Vista em corte de uma configuração de parafuso rotativo.
Estrutura e mecânica da porca rotativa
O conjunto de porcas rotativas tem o design mais mínimo e compacto das três configurações. Este projeto permite o comprimento total e retraído mais curto, sem praticamente nenhuma rotação visível de qualquer um de seus componentes. Outros nomes para este estilo de atuador são porca de avanço motorizada, não cativa, porca interna e parafuso de translação.
A mecânica de uma porca rotativa SMLA é essencialmente o inverso da configuração do parafuso rotativo. Quando o motor é acionado, a porca de avanço integrada dentro do eixo do motor gira e induz o parafuso de avanço preso a uma carga para transladar para dentro e para fora do motor.
Figura 3. Vista em corte de uma configuração de porca rotativa.
Estrutura e mecânica telescópica
Os atuadores de estilo telescópico destinam-se a funcionar mais como os atuadores de estilo de haste tradicionais encontrados na maioria das aplicações industriais, enquanto ainda têm os benefícios de um motor de passo configurável e unidade à base de parafuso de avanço. Em seu núcleo, o atuador telescópico é uma configuração de parafuso rotativo com componentes de carcaça extras que "capturam" a porca de avanço dentro de uma ranhura e usam uma bucha interna para fornecer algum suporte de carga lateral e de momento. Como essas configurações incorporam orientação e suporte diretamente em seu design, em muitos casos, elas não precisarão dos componentes externos que poderiam ser necessários. Outros nomes para este estilo de atuador são atuador de parafuso de avanço motorizado, cativo, haste elétrica e cilindro elétrico.
A mecânica de um SMLA telescópico é semelhante à de uma configuração de parafuso rotativo. A principal diferença é que sua configuração integra componentes de orientação e suporte na forma de um tubo de cobertura estriado e tubo de extensão com uma bucha de suporte, que permite o movimento sem a necessidade de componentes externos.
Figura 4. Vista em corte de uma configuração de estilo telescópico.
Instalação
Todas as três configurações de SMLA têm um processo de instalação semelhante, que consiste principalmente na montagem do motor, no suporte do parafuso de avanço, se necessário, e na fixação da carga. As principais diferenças residem em onde a carga é fixada e como ela é suportada. (Figura 5) Para configurações de parafuso rotativo, a carga se conecta à porca de avanço, e a extremidade do parafuso de avanço precisará ser suportada com um rolamento ou bucha para comprimentos mais longos.
Para configurações de porca rotativa, a carga é anexada ao parafuso de avanço. E para a configuração telescópica, a carga será anexada à montagem final no tubo de extensão.
Ambas as configurações de parafuso e porca rotativos são destinadas a suportar apenas cargas axiais, de modo que a orientação e o suporte na forma de rolamentos lineares e trilhos de guia serão necessários para o funcionamento adequado. Uma vez que a orientação e o suporte são tipicamente integrados em atuadores telescópicos, a necessidade de rolamentos lineares e trilhos de guia pode ser eliminada em muitos cenários.
Figura 5. Este exemplo de aplicação de bomba de fluido ilustra as configurações de montagem típicas para todos os três SMLAs (da esquerda para a direita: parafuso rotativo, porca rotativa, telescópica).
Dimensionamento para aplicações
Os altos níveis de personalização e configurabilidade do SMLA oferecem inúmeras possibilidades de aplicação. A Figura 6 mostra alguns exemplos comuns de aplicações SMLA.
Figura 6. Ao reduzir o número total de componentes necessários, os SMLAs são ideais para uma ampla variedade de aplicações com consciência de espaço, incluindo (da esquerda para a direita): estágio XY (parafusos rotativos), posicionamento horizontal (porca rotativa) e pipetagem de fluido (parafuso telescópico e rotativo).
O dimensionamento de um SMLA para uma aplicação específica, então envolve principalmente a compreensão do motor, parafuso de avanço e limitações da porca de avanço. Cada um desses componentes principais deve ser dimensionado adequadamente para garantir a funcionalidade adequada e a vida útil ideal. Felizmente, a maioria dos fabricantes fornece gráficos de desempenho teórico que consideram esses componentes, tornando muito mais fácil dimensionar um atuador rapidamente. Esses gráficos geralmente assumem a forma de uma curva de velocidade vs. carga e destacam a faixa de desempenho ideal da combinação de motor, parafuso e porca.
Comparando SMLAs
Os SMLAs permitem uma abordagem modular de projeto de sistema de movimento que permite que os engenheiros alcancem uma solução altamente adaptada aos seus requisitos de aplicação específicos. Determinar qual dos três SMLAs é o melhor depende de muitos fatores orientados pela aplicação.
Aqueles que buscam a máxima personalização ou uma combinação verdadeiramente única de componentes devem considerar atuadores de parafuso rotativos. Os designs de parafusos rotativos são o tipo de SMLA mais comumente implantado, então muitos engenheiros já estarão bastante familiarizados com eles.
Aplicações que se beneficiariam de um atuador mais compacto e simples e que não requerem uma porca antirretorno ou muitas opções de codificadores podem ser melhor atendidas por projetos de porcas rotativas. Os engenheiros que preferem cair em um projeto de atuador mais tradicional e em estilo de haste e cujas aplicações se beneficiariam da orientação integrada, suporte e antirrotação embutida devem considerar o projeto telescópico. Essa configuração também vale a pena considerar se a redução da contagem geral de componentes é importante porque os componentes de orientação/suporte integrados eliminam a necessidade de comprar externos. A Tabela 1 resume os pontos fortes e fracos mais comuns de cada configuração SMLA, bem como alguns exemplos de aplicação comuns.
Para auxiliar projetistas e integradores a percorrer as muitas opções, os fabricantes de SMLA estão cada vez mais oferecendo ferramentas on-line para ajudá-los a configurar soluções de forma rápida e fácil para suas aplicações. Por exemplo, existem ferramentas de seleção on-line que permitem aos usuários identificar o SMLA certo para sua aplicação em questão de minutos, enquanto acessam imediatamente características de desempenho, modelos 3D, preços e tempo de espera.
A aplicação de ferramentas de seleção automatizadas no contexto de uma compreensão do design, mecânica, instalação e dimensionamento dos três principais tipos de SMLA pode ajudar a orientar os projetistas e integradores de movimento para a escolha ideal para suas aplicações.